Chapter 5 Bluetooth remote control robot
This section requires an Android or iPhone device with Bluetooth to control the robot.
If you have any concerns, please feel free to contact us via support@freenove.com
Bluetooth Sending and Receiving Data
Bluetooth Module
The Bluetooth module is a serial port transparent transmission module that supports Bluetooth Low Energy (BLE).
It has such advantages as small size, high performance, high-cost performance, low power consumption, and strong platform compatibility. The Bluetooth module we use is as shown below:

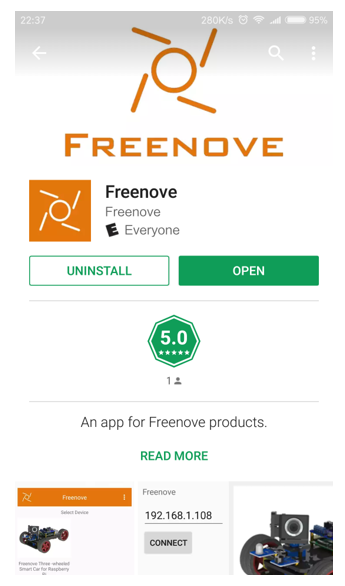
Install Freenove app
There are three ways to install our app.
Method 1
Use Google play to search “Freenove”, download and install.
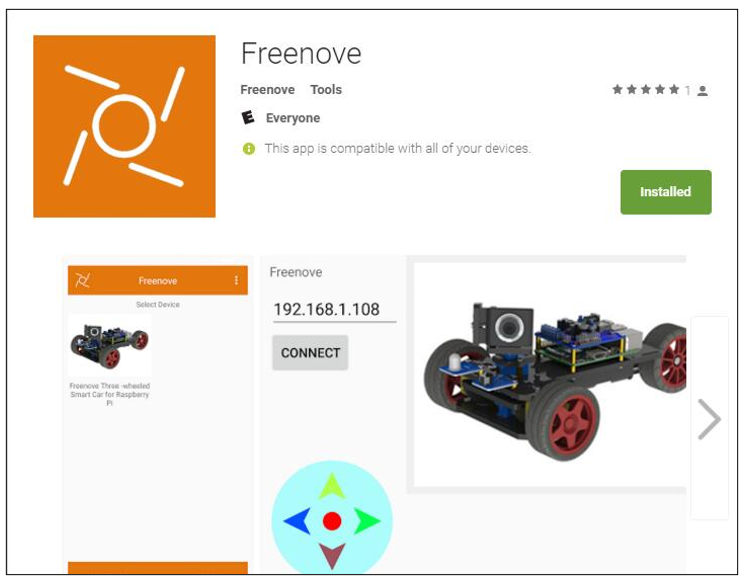
Method 2
Visit https://play.google.com/store/apps/details?id=com.freenove.suhayl.Freenove, and click install.
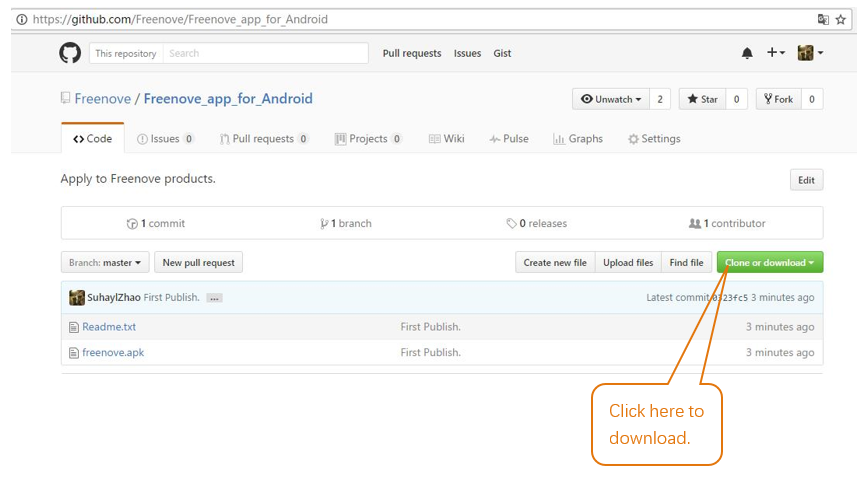
Method 3
Visit https://github.com/Freenove/Freenove_app_for_Android, download the files in this library, and install freenove.apk to your Android phone manually.
Instructions for Using the Bluetooth Module
The Bluetooth module communicates with the Raspberry Pi Pico (W) through serial port, and the program is also uploaded to Pico (W) via the serial port. Therefore, when uploading code to pico (W), if it fails, please remove the Bluetooth module and upload again.
When the Bluetooth module is not connected by other device, it can be configured using the AT command. Once connected, the Bluetooth module acts as a data pipe and cannot be configured.
By default, the Bluetooth module has a baud rate of 115200, no parity, 8 data bits, and 1 stop bit. Bluetooth name “BT05”, role mode is slave mode.
Set name of bluetooth
If you have multiple Bluetooth modules with the same name around you, you will be confused when you connect. Which one is the Bluetooth module I want to connect to?
In the next project, we will introduce how to use the AT command to modify the name of the Bluetooth module and the master-slave role in the program.
For AT commands and more information about the Bluetooth module, refer to the documentation in the package for Datasheets/BT05-Instruction.pdf
This project uses the AT command to make some settings for the Bluetooth module, then uses the Bluetooth module to receive data from the app and print the data on the serial monitor.
Menu
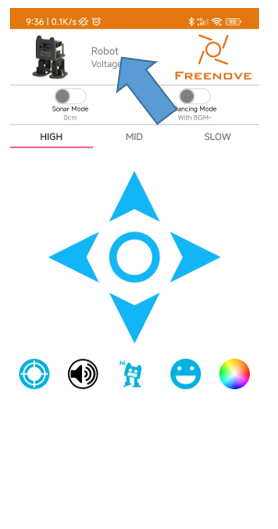
Open application “Freenove”, as shown below:
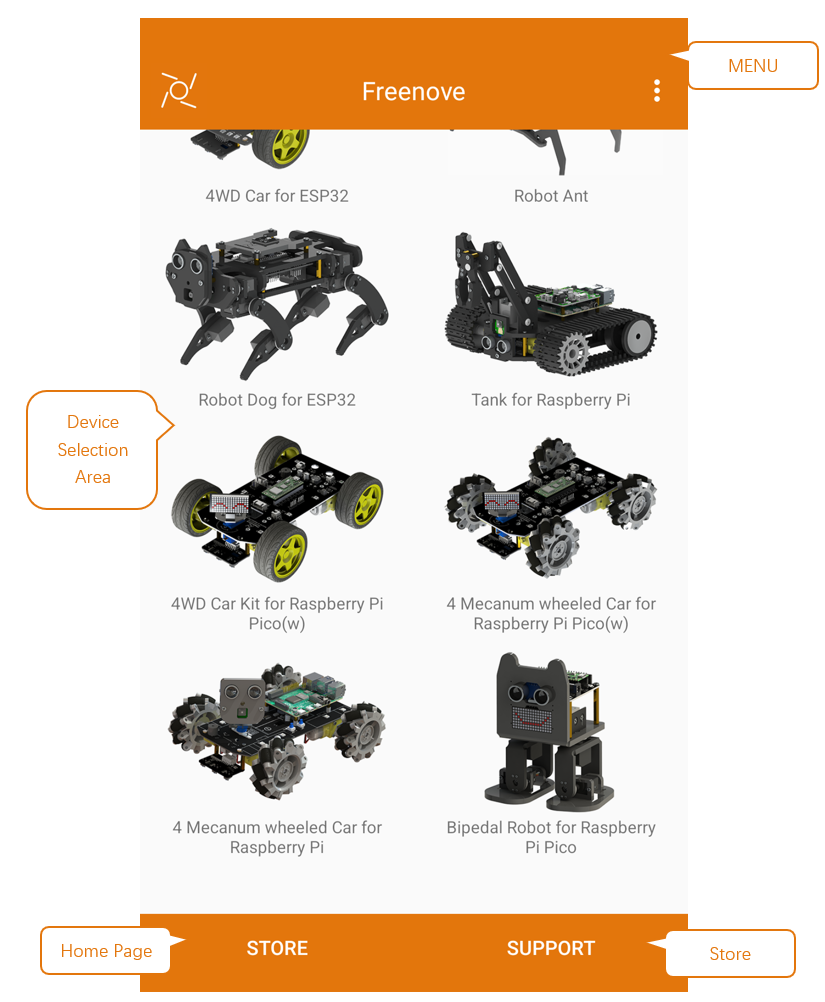
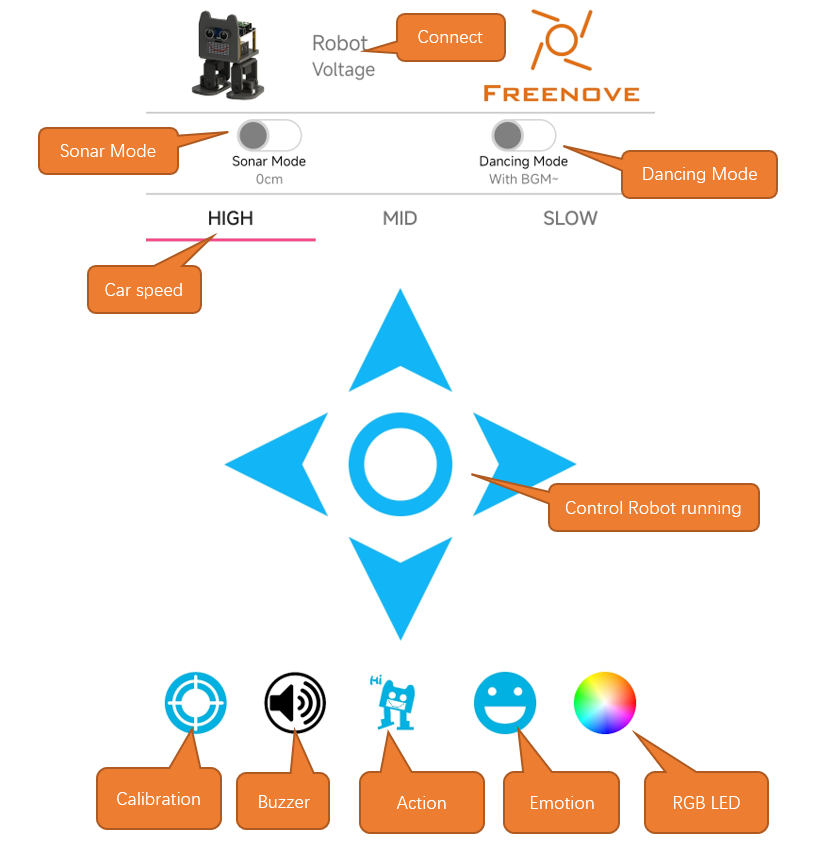
Introduction to the APP
In this chapter, we use the Freenove Bipedal robot for Raspberry Pi Pico (W) in the app, so let’s learn its interface first, as shown below:
Sketch
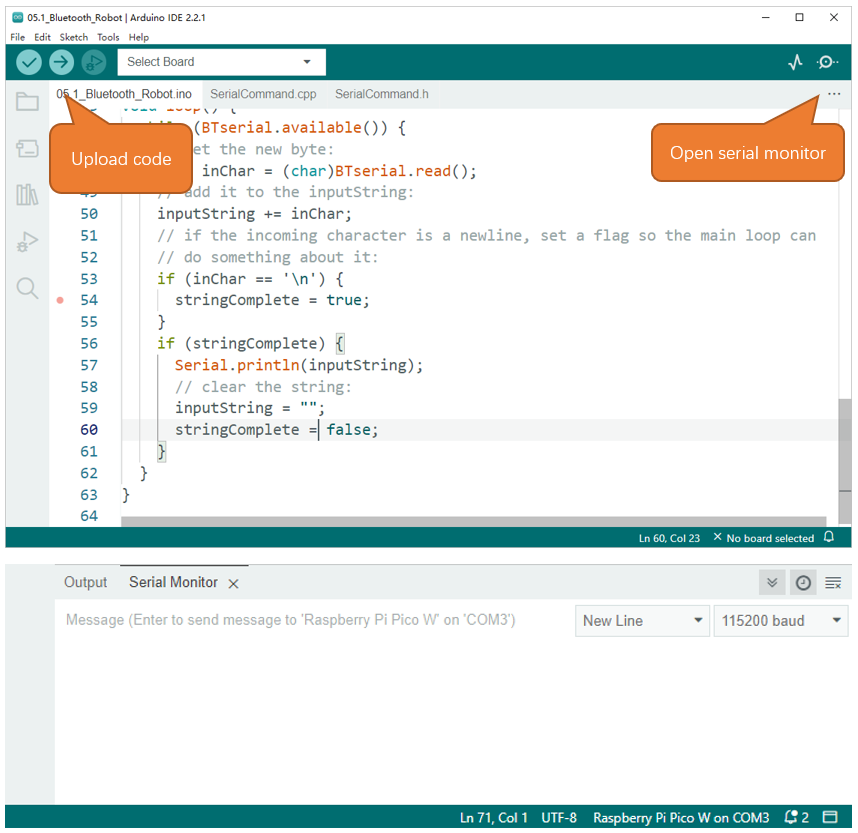
Open “05.1_Bluetooth_Robot” in “ Freenove_Bipedal_Robot_Kit_for_Raspberry_Pi_Pico\Sketches ” and double click “05.1_Bluetooth_Robot.ino”.
Note: if the code fails to upload, please remove the Bluetooth and upload it again.
After the code is successfully uploaded, follow the steps below.
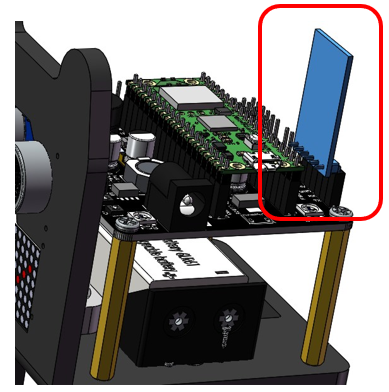
Plug the Bluetooth module to thecar as shown below. Don’t reverse it. The wrong connection may damage your hardware.
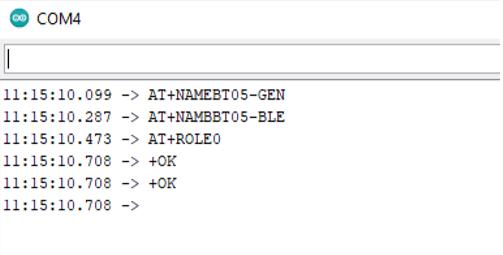
Open Arduino Serial Monitor, and reset the control board.
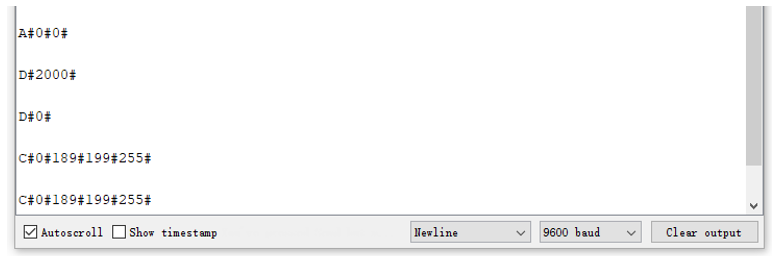
As shown in the figure below, the Bluetooth name is set to “BT05” and the Bluetooth mode is slave mode (ROLE=0).
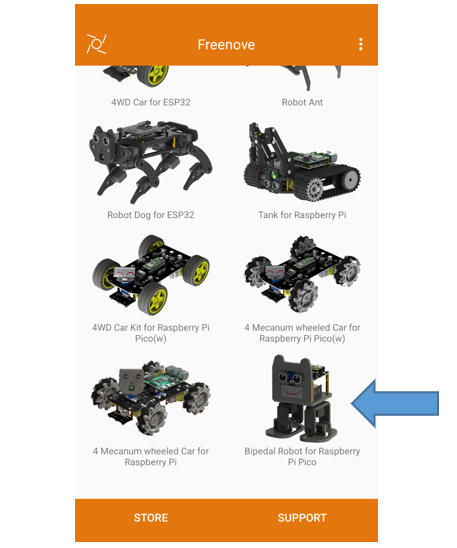
Next, open Freenove APP, tap e Freenove Bipedal Robot for Raspberry Pi Pico.
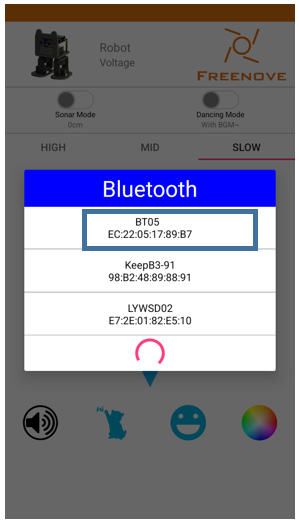
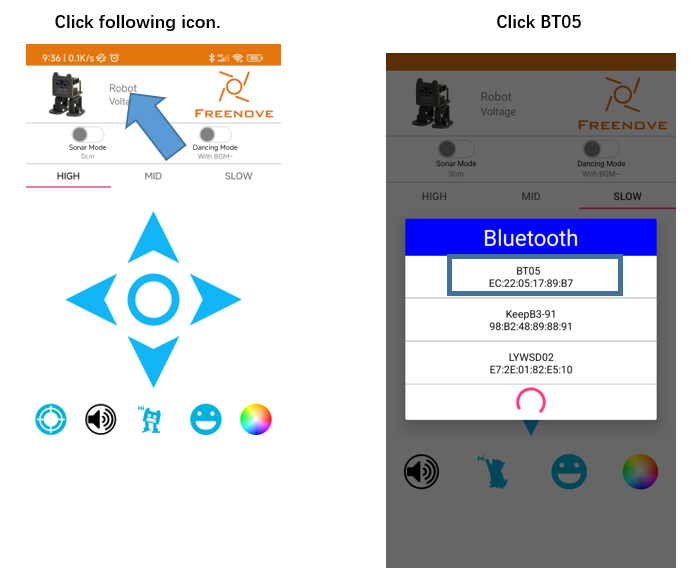
Click the following icon.
Click BT05.
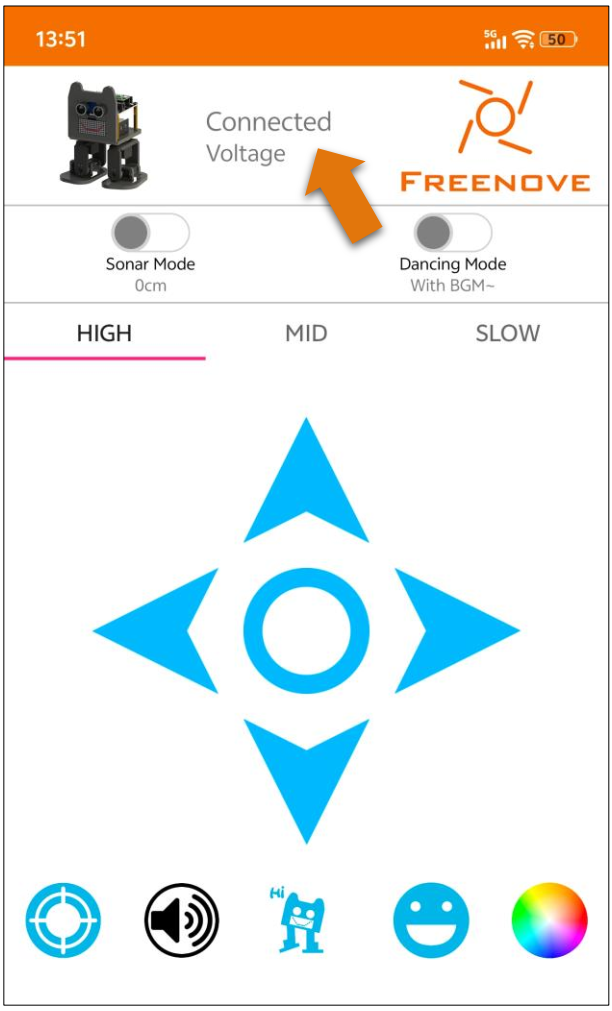
If the connection successes, you can see “Connected”.
Operate the app, and observe the monitor.
The monitor will show contents as below:
Bluetooth data- robot action
The command format for communication between app and robot is A#xxx#xxx#…xxx#, where # is a separator, the first character A represents the action command, it can be other characters, such as B, C, D…The xxx represents the parameters of the action command. And different commands carry different parameters. The command list is as below:
Action command |
Description |
Command character |
Number of parameters (app send/receive) |
Format example (app send/receive) |
|---|---|---|---|---|
MOVE |
Under the MOVE mode, parameter 1 represents the movement mode, and parameter 2 indicates the moving speed. |
A |
2 |
A#100#100# |
VOLTAGE |
Get the batteries voltage, parameter is the voltage value, unit mV |
P |
0/1 |
P# /P#4100# |
LED_RGB |
Control RGBLED, parameters respectively are serial number of LED mode, red value, green value, blue value. |
C |
4 |
C#2#100#150#200# |
BUZZER |
Control buzzer, and parameter is the frequency. |
D |
1 |
D#2000# |
Code
1/**********************************************************************
2 Filename : Receive_Bluetooth_Data.ino
3 Product : Freenove Robot for Raspberry Pi Pico (W)
4 Description : Receive data from bluetooth and print it to monitor.
5 Auther : www.freenove.com
6 Modification: 2023/11/07
7**********************************************************************/
8#include <Arduino.h>
9#include <SoftwareSerial.h> // Reference library
10
11#include "SerialCommand.h"
12SoftwareSerial BTserial = SoftwareSerial(1, 0); // RX pin to 0 and TX pin to 1 on the board
13SerialCommand SCmd(BTserial);
14
15String inputString = ""; // a String to hold incoming data
16bool stringComplete = false;// whether the string is complete
17int baudRate[] = {2400, 9600, 19200, 115200};
18int baudRateCount = sizeof(baudRate) / sizeof(baudRate[0]);
19
20void receiveStop() {
21 delay(10);
22 Serial.flush();
23}
24
25void setup() {
26 Serial.begin(9600);
27 delay(2000);
28 // Loop through each baud rate and send commands
29 for(int i = 0; i < baudRateCount; i++){
30 BTserial.begin(baudRate[i]);
31 delay(200);
32 BTserial.println("AT+NAME=BT05");//Set the radio called Robot
33 delay(200);
34 BTserial.println("AT+ROLE=0");
35 delay(200);
36 BTserial.println("AT+UART=2");//1=2400 2=9600 3=19200 4=115200
37 delay(200);
38
39 //SoftwareSerial does not support dynamic adjustment of baud rate, so close the serial
40 BTserial.end();
41 }
42
43 BTserial.begin(9600);
44 delay(2000);
45
46 SCmd.addDefaultHandler(receiveStop);
47 inputString.reserve(200);
48 Serial.println("Set the name of the Bluetooth module to BT05.");
49 Serial.println("Set the Bluetooth baud rate to 9600.");
50 // Serial.println("Set Bluetooth to slave mode.");
51}
52
53void loop() {
54 while (BTserial.available()) {
55 // get the new byte:
56 char inChar = (char)BTserial.read();
57 // add it to the inputString:
58 inputString += inChar;
59 // if the incoming character is a newline, set a flag so the main loop can
60 // do something about it:
61 if (inChar == '\n') {
62 stringComplete = true;
63 }
64 if (stringComplete) {
65 Serial.println(inputString);
66 // clear the string:
67 inputString = "";
68 stringComplete = false;
69 }
70 }
71}
Uplode the code to Raspberry Pi Pico W car and open serial monitor.
Open Freenove app, and tap the bipedal robot for Raspberry Pi Pico (W).

Code Explanation
Configure Bluetooth, set the Bluetooth name, baud rate and other parameters.
1Serial.begin(9600);
2delay(2000);
3// Loop through each baud rate and send commands
4for(int i = 0; i < baudRateCount; i++){
5 BTserial.begin(baudRate[i]);
6 delay(200);
7 BTserial.println("AT+NAME=BT05");//Set the radio called Robot
8 delay(200);
9 BTserial.println("AT+ROLE=0");
10 delay(200);
11 BTserial.println("AT+UART=2");//1=2400 2=9600 3=19200 4=115200
12 delay(200);
13
14 //SoftwareSerial does not support dynamic adjustment of baud rate, so close the serial
15 BTserial.end();
16}
17
18BTserial.begin(9600);
After the Bluetooth module connects successfully, print the data it receives.
1while (BTserial.available()) {
2 // get the new byte:
3 char inChar = (char)BTserial.read();
4 // add it to the inputString:
5 inputString += inChar;
6 // if the incoming character is a newline, set a flag so the main loop can
7 // do something about it:
8 if (inChar == '\n') {
9 stringComplete = true;
10 }
11 if (stringComplete) {
12 Serial.println(inputString);
13 // clear the string:
14 inputString = "";
15 stringComplete = false;
16 }
17}
Bluetooth Remote Robot
In the previous section, we have learned how to receive the data of the app via Bluetooth, and the meanings of the data format. Next, let’s use the data to control the robot to make some basic movements, like moving forward and backward, turning left and right, etc.
Sketch
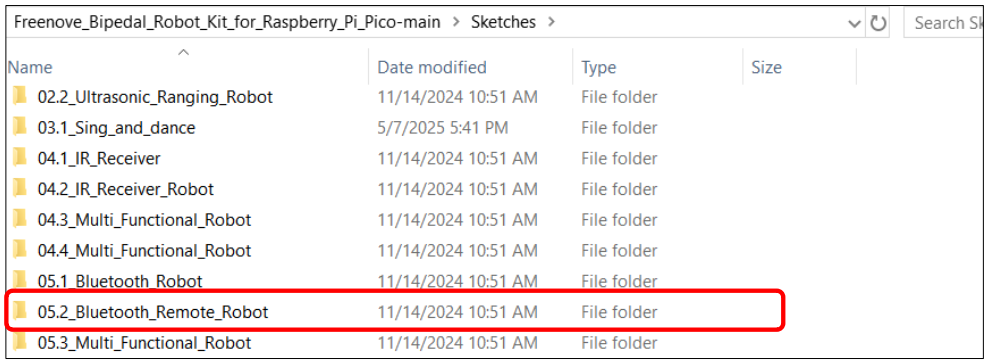
Open the folder “05.2_Bluetooth_Remote_Robot” in
Freenove_Bipedal_Robot_Kit_for_Raspberry_Pi_Pico\Sketches and double click “05.2_Bluetooth_Remote_Robot.ino”.
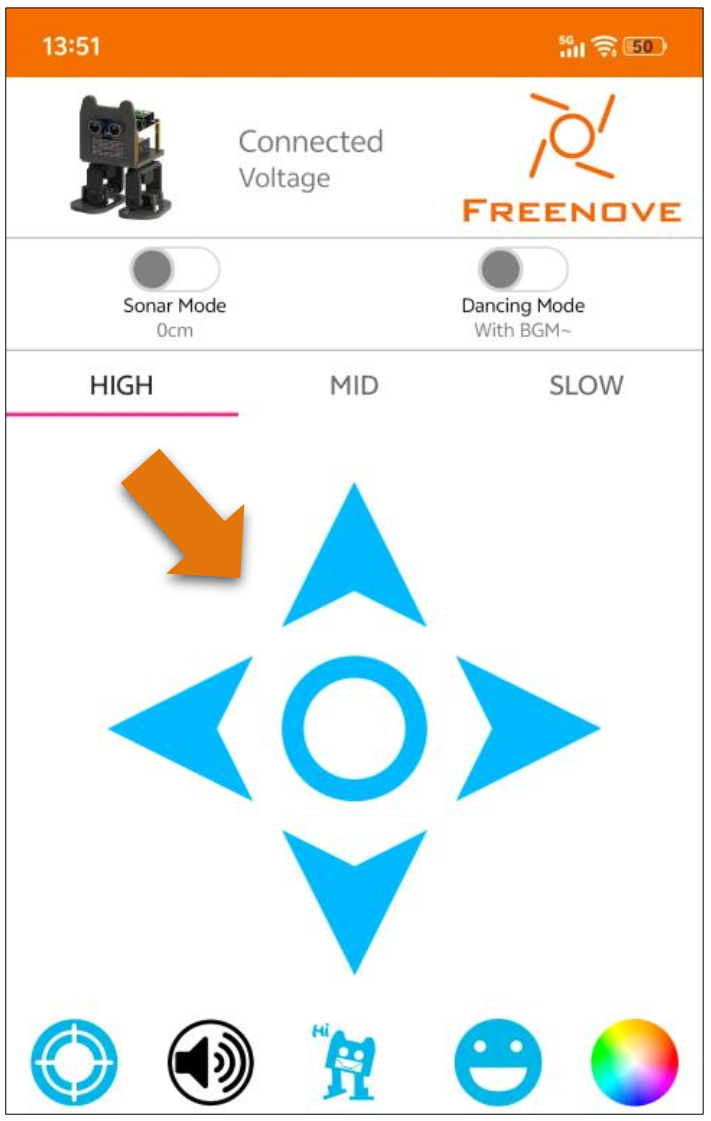
Connect the App to the Bluetooth of the robot, and tap the directional keys to control its movements.
Code
1/**********************************************************************
2 Product : Freenove Robot for Raspberry Pi Pico (W)
3 Description : Control the robot movement.
4 Auther : www.freenove.com
5 Modification: 2023/11/07
6**********************************************************************/
7//Check that the servos are properly connected to the corresponding interface before uploading the code
8/************************************
9 --- ---
10 ---------------
11 | O O |
12 |---------------|
13YR 12==>| | <== YL 10
14 ---------------
15 || ||
16 || ||
17RR 13==> ----- ------ <== RL 11
18 |----- ------|
19************************************/
20#include <Arduino.h>
21#include <SoftwareSerial.h>
22#include <EEPROM.h>
23#include "Freenove_Robot_For_Pico_W.h"
24
25#include "SerialCommand.h"
26SoftwareSerial BTserial = SoftwareSerial(1, 0); // RX pin to 1 and TX pin to 0 on the board
27SerialCommand SCmd(BTserial);
28#include "Bipedal_Robot.h"
29Bipedal_Robot Bipedal_Robot;
30
31#define LeftLeg 10
32#define RightLeg 12
33#define LeftFoot 11
34#define RightFoot 13
35
36int YL;
37int YR;
38int RL;
39int RR;
40
41int T = 1000;
42int moveId = 0;
43bool isServoResting = true;
44
45extern int moveId;
46extern bool isServoResting;
47
48int moveSize = 15;
49
50String inputString = ""; // a String to hold incoming data
51bool stringComplete = false;// whether the string is complete
52int baudRate[] = {2400, 9600, 19200, 115200};
53int baudRateCount = sizeof(baudRate) / sizeof(baudRate[0]);
54
55void receiveStop() {
56 sendAck();
57 sendFinalAck();
58}
59
60void recieveBuzzer() {
61 sendAck();
62 bool error = false;
63 int frec;
64 int duration;
65 char *arg;
66 arg = SCmd.next();
67 if (arg != NULL) frec = atoi(arg);
68 else error = true;
69 Serial.println("\nfrec is:");
70 Serial.println(frec);
71 tone(2, frec);
72 sendFinalAck();
73}
74
75void receiveMovement() {
76 sendAck();
77 Serial.print("move loop...");
78 if (Bipedal_Robot.getRestState() == true) Bipedal_Robot.setRestState(false);
79 isServoResting = Bipedal_Robot.getRestState();
80 char *arg;
81 arg = SCmd.next();
82 if (arg != NULL) {
83 moveId = atoi(arg);
84 Serial.print("moveId:");
85 Serial.print(moveId);
86 } else {
87 moveId = 0;
88 }
89 arg = SCmd.next();
90 if (arg != NULL) {
91 T = atoi(arg);
92 if (T == 0) {
93 T = 1000;
94 } else if (T == 1) {
95 T = 1500;
96 } else if (T == 2) {
97 T = 2000;
98 }
99 } else T = 2000;
100 Serial.print("T is:");
101 Serial.print(T);
102 arg = SCmd.next();
103 if (arg != NULL) moveSize = atoi(arg);
104 else moveSize = 15;
105}
106void move(int moveId) {
107 // bool manualMode = false;
108 switch (moveId) {
109 case 0:
110 Bipedal_Robot.home();
111 // Serial.print("moveId 0 home");
112 break;
113 case 1:
114 Bipedal_Robot.walk(1, T, 1);
115 break;
116 case 2:
117 Bipedal_Robot.walk(1, T, -1);
118 break;
119 case 3:
120 Bipedal_Robot.turn(1, T, 1);
121 break;
122 case 4:
123 Bipedal_Robot.turn(1, T, -1);
124 break;
125 default:
126 break;
127 }
128}
129
130void sendAck() {
131 delay(10);
132 Serial.flush();
133}
134void sendFinalAck() {
135 delay(10);
136 Serial.flush();
137}
138
139void setup() {
140 Serial.begin(9600);
141 delay(2000);
142 // Loop through each baud rate and send commands
143 for(int i = 0; i < baudRateCount; i++){
144 BTserial.begin(baudRate[i]);
145 delay(200);
146 BTserial.println("AT+NAME=BT05");//Set the radio called Robot
147 delay(200);
148 BTserial.println("AT+ROLE=0");
149 delay(200);
150 BTserial.println("AT+UART=2");//1=2400 2=9600 3=19200 4=115200
151 delay(200);
152
153 //SoftwareSerial does not support dynamic adjustment of baud rate, so close the serial
154 BTserial.end();
155 }
156
157 BTserial.begin(9600);
158 delay(1500);
159 Buzzer_Setup(); //Initialize the buzzer
160 EEPROM.begin(512);
161 Bipedal_Robot.init(LeftLeg, RightLeg, LeftFoot, RightFoot, true); //Set the servo pins and Buzzer pin
162
163 YL = EEPROM.read(0);
164 if (YL > 128) YL -= 256;
165 YR = EEPROM.read(1);
166 if (YR > 128) YR -= 256;
167 RL = EEPROM.read(2);
168 if (RL > 128) RL -= 256;
169 RR = EEPROM.read(3);
170 if (RR > 128) RR -= 256;
171 Bipedal_Robot.setTrims(YL, YR, RL, RR);
172 calib_homePos();
173 Bipedal_Robot.saveTrimsOnEEPROM();
174 Bipedal_Robot.home();
175 delay(100);
176 EEPROM.commit();
177 SCmd.addCommand("S", receiveStop);
178 SCmd.addCommand("D", recieveBuzzer);
179 SCmd.addCommand("A", receiveMovement);
180
181 inputString.reserve(200);
182 SCmd.addDefaultHandler(receiveStop);
183 Serial.println("Set the name of the Bluetooth module to BT05.");
184 Serial.println("Set the Bluetooth baud rate to 9600.");
185 Bipedal_Robot.home();
186}
187
188void loop() {
189 SCmd.readSerial();
190 move(moveId);
191}
192
193void calib_homePos() {
194 int servoPos[4];
195 servoPos[0] = 90;
196 servoPos[1] = 90;
197 servoPos[2] = 90;
198 servoPos[3] = 90;
199 Bipedal_Robot._moveServos(500, servoPos);
200 Bipedal_Robot.detachServos();
201}
Code Explanation
Add the header files to drive the robot.
1#include <Arduino.h>
2#include <SoftwareSerial.h>
3#include <EEPROM.h>
4#include "Freenove_Robot_For_Pico_W.h"
5
6#include "SerialCommand.h"
Upon receiving movement commands, the robot makes corresponfing actions.
1 Serial.print(T);
2 arg = SCmd.next();
3 if (arg != NULL) moveSize = atoi(arg);
4 else moveSize = 15;
5}
6void move(int moveId) {
7 // bool manualMode = false;
8 switch (moveId) {
9 case 0:
10 Bipedal_Robot.home();
11 // Serial.print("moveId 0 home");
12 break;
13 case 1:
14 Bipedal_Robot.walk(1, T, 1);
15 break;
16 case 2:
17 Bipedal_Robot.walk(1, T, -1);
18 break;
19 case 3:
20 Bipedal_Robot.turn(1, T, 1);
21 break;
22 case 4:
23 Bipedal_Robot.turn(1, T, -1);
Multifunctional Bluetooth Remote Robot
In this section, we add more functions to the robot based on the previous section, making the robot more interested. The main functions include automatic obstacle avoidance, audio playing, LED displaying, and expressions on LED dot matrix.
Upload Code and Running
Connect the robot to your computer with the USB cable.
As this section involves the audio playing function, please upload the audio data to the Raspberry Pi Pico (W) before uploading sketch. You can find the detailed steps here.
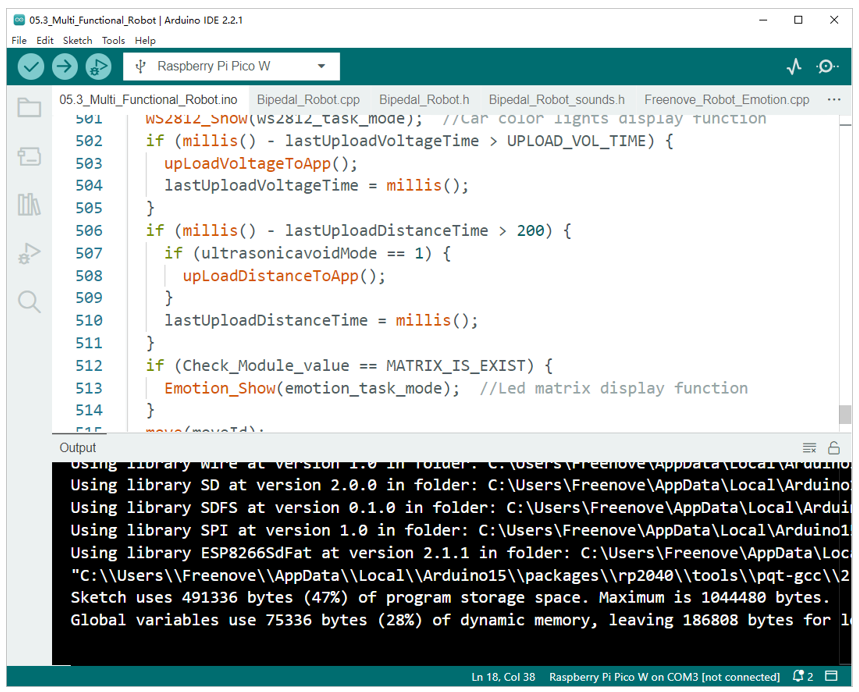
After uploading the audio file, you can upload sketch 05.3_Multi_Functional_Robot to the robot.
If the code fails to upload, please remove the Bluetooth module and upload again. Reconnect the Bluetooth module after the code uploads successfully.
After the code is successfully uploaded, unplug the USB cable and plug the Bluetooth module to the robot. Turn on the robot power switch.
Connect the APP with the robot through Bluetooth. Tap or swipe the operation panels on the app to control the robot’s movements. The color palette of the lower right corner can be clicked to control the display mode and color of the LED. Among them,
Mode 0 is a flowing rainbow,
Mode 1 is a flowing water LED with color changing.
Mode 2 is a color-adjustable Blink.
Mode 3 displays the selected color of the current color picker for all LEDs.
Code
On the basis of the previous sketch, this one is added with more interesting functions.
Multi_Functional_Robot
1/**********************************************************************
2 Product : Freenove Robot for Raspberry Pi Pico (W)
3 Description : Multi Functional Robot.
4 Auther : www.freenove.com
5 Modification: 2023/11/07
6**********************************************************************/
7//Check that the servos are properly connected to the corresponding interface before uploading the code
8/************************************
9 --- ---
10 ---------------
11 | O O |
12 |---------------|
13YR 12==>| | <== YL 10
14 ---------------
15 || ||
16 || ||
17RR 13==> ----- ------ <== RL 11
18 |----- ------|
19************************************/
20#include <Arduino.h>
21#include <EEPROM.h>
22#include "Bipedal_Robot.h"
23#include "AudioFileSourceLittleFS.h"
24#include "AudioGeneratorMP3.h"
25#include "AudioOutputI2SNoDAC.h"
26#include "AudioFileSourceID3.h"
27#include "AudioOutputI2S.h"
28#include <SoftwareSerial.h>
29#include "SerialCommand.h"
30#include "Freenove_Robot_For_Pico_W.h"
31#include "Freenove_Robot_Emotion.h"
32#include "Freenove_Robot_WS2812.h"
33#include "Freenove_VK16K33_Lib.h"
34
35SoftwareSerial BTserial = SoftwareSerial(1, 0); // RX pin to 0 and TX pin to 1 on the board
36SerialCommand SCmd(BTserial);
37
38Bipedal_Robot Bipedal_Robot;
39AudioGeneratorMP3 *mp3;
40AudioFileSourceLittleFS *file;
41AudioOutputI2SNoDAC *out;
42AudioFileSourceID3 *id3;
43
44#define LeftLegPin 10
45#define RightLegPin 12
46#define LeftFootPin 11
47#define RightFootPin 13
48#define BuzzerPin 20
49
50int motionFlag = 0;
51int ultrasonicavoidMode = 0;
52int playstartingmusic = 0;
53int musicmode = 0;
54int playsong = 0;
55extern int playsong; //Set the proportional coefficient
56int T = 1000;
57int moveId = 0;
58int dance_steps = 0;
59int Ultrasonic_Avoid_steps = 0;
60bool isServoResting = true;
61extern int moveId;
62extern bool isServoResting;
63int moveSize = 15;
64
65String inputString = ""; // a String to hold incoming data
66bool stringComplete = false;// whether the string is complete
67int baudRate[] = {2400, 9600, 19200, 115200};
68int baudRateCount = sizeof(baudRate) / sizeof(baudRate[0]);
69
70#define ACTION_GET_VOLTAGE 'P'
71#define ACTION_GET_DISTANCE 'E'
72#define INTERVAL_CHAR '#'
73unsigned long lastUploadVoltageTime;
74unsigned long lastUploadDistanceTime;
75#define UPLOAD_VOL_TIME 2000
76
77int Resting = 0;
78float Distance = 0;
79
80// int calibratePosition[4] = { -17, -10, -15, 12 };
81// int YL;
82// int YR;
83// int RL;
84// int RR;
85
86void upLoadVoltageToApp() {
87 float voltage = 0;
88 voltage = Get_Battery_Voltage();
89 BTserial.print("P#");
90 BTserial.println(int(voltage * 1000));
91}
92
93void upLoadDistanceToApp() {
94 Distance = Get_Sonar();
95 BTserial.print("E#");
96 BTserial.println(Distance);
97}
98
99void receiveStop() {
100 sendAck();
101 sendFinalAck();
102}
103
104void recieveBuzzer() {
105 sendAck();
106 moveId = 0;
107 playsong = 0;
108 bool error = false;
109 int frec;
110 char *arg;
111 arg = SCmd.next();
112 if (arg != NULL) frec = atoi(arg);
113 else error = true;
114 tone(2, frec);
115 sendFinalAck();
116}
117
118void receiveAvoid() {
119 sendAck();
120 ws2812_task_mode = 0;
121 emotion_task_mode = 0;
122 if (Bipedal_Robot.getRestState() == true) Bipedal_Robot.setRestState(false);
123 isServoResting = Bipedal_Robot.getRestState();
124 char *arg;
125 arg = SCmd.next();
126 if (arg != NULL) {
127 ultrasonicavoidMode = atoi(arg);
128 playsong = 0;
129 if (ultrasonicavoidMode == 1) {
130 moveId = 21;
131 Ultrasonic_Avoid_steps = 0;
132 playsong = 0;
133 }
134 if (ultrasonicavoidMode == 2) {
135 dance_steps = 0;
136 moveId = 22;
137 playsong = 4;
138 }
139 if (ultrasonicavoidMode == 0) {
140 moveId = 0;
141 Resting = 1;
142 playsong = 0;
143 }
144 }
145 sendFinalAck();
146}
147
148void receiveEmotion() {
149 sendAck();
150 Emotion_Setup();
151 moveId = 0;
152 playsong = 0;
153 char *arg;
154 char *endstr;
155 arg = SCmd.next();
156 if (arg != NULL) {
157 String stringOne = String(arg); // converting a constant char into a String
158 emotion_task_mode = stringOne.toInt();
159 Emotion_SetMode(emotion_task_mode); //显示静态表情
160 } else {
161 }
162 sendFinalAck();
163}
164
165void receiveLED() {
166 sendAck();
167 moveId = 0;
168 playsong = 0;
169 char *arg;
170 unsigned char paramters[3];
171 char *endstr;
172 arg = SCmd.next();
173 if (arg != NULL) {
174 String stringOne = String(arg); // converting a constant char into a String
175 ws2812_task_mode = stringOne.toInt();
176 } else {
177 }
178 arg = SCmd.next();
179 String stringOne1 = String(arg);
180 paramters[0] = stringOne1.toInt();
181
182 arg = SCmd.next();
183 String stringOne2 = String(arg);
184 paramters[1] = stringOne2.toInt();
185
186 arg = SCmd.next();
187 String stringOne3 = String(arg);
188 paramters[2] = stringOne3.toInt();
189
190 WS2812_Set_Color_1(15, paramters[0], paramters[1], paramters[2]);
191 sendFinalAck();
192}
193
194void songmusic() {
195 if (playsong > 0) {
196 playmusic(1, playsong);
197 if (playsong != 4) {
198 playsong = 0;
199 }
200 } else {
201 pinMode(6, OUTPUT);
202 digitalWrite(6, LOW);
203 }
204}
205void receiveMusic() {
206 int music_song;
207 sendAck();
208 ws2812_task_mode = 0;
209 emotion_task_mode = 0;
210 if (Bipedal_Robot.getRestState() == true) Bipedal_Robot.setRestState(false);
211 isServoResting = Bipedal_Robot.getRestState();
212 char *arg;
213 arg = SCmd.next();
214 if (arg != NULL) {
215 music_song = atoi(arg);
216 playsong = music_song;
217 playstartingmusic = music_song;
218 clearEmtions();
219 if (playsong == 1) {
220 moveId = 18; //play music Hello.mp3
221 } else if (playsong == 2) {
222 moveId = 19; //play music Nicetomeetyou.mp3
223 } else if (playsong == 3) {
224 moveId = 20; //play music goodbye.mp3
225 Serial.print("yundong");
226 } else if (playsong == 0) {
227 moveId = 0;
228 }
229 Serial.print("moveId:");
230 Serial.print(moveId);
231 } else {
232 moveId = 0;
233 Resting = 1;
234 }
235}
236
237void playmusic(int playtimes, int song) {
238 if (playtimes--) {
239 if (song == 1) {
240 file = new AudioFileSourceLittleFS("Hello.mp3");
241 } else if (song == 2) {
242 file = new AudioFileSourceLittleFS("Nicetomeetyou.mp3");
243 } else if (song == 3) {
244 file = new AudioFileSourceLittleFS("goodbye.mp3");
245 } else if (song == 4) {
246 file = new AudioFileSourceLittleFS("1.mp3");
247 } else if (song == 5) {
248 file = new AudioFileSourceLittleFS("onfoot.mp3");
249 } else if (song == 6) {
250 file = new AudioFileSourceLittleFS("hello_cn.mp3");
251 } else if (song == 0) {
252 file = new AudioFileSourceLittleFS("split.mp3");
253 }
254 out = new AudioOutputI2SNoDAC(6);
255 out->SetGain(4.0); //Volume Setup (0-4.0)
256 mp3 = new AudioGeneratorMP3();
257 mp3->begin(file, out);
258 if (mp3->isRunning() && song > 0) {
259 if (!mp3->loop() && song > 0) {
260 delete file;
261 delete mp3;
262 out->flush();
263 out->stop();
264 }
265 } else {
266 delete file;
267 delete mp3;
268 out->flush();
269 out->stop();
270 pinMode(6, OUTPUT);
271 digitalWrite(6, LOW);
272 }
273 }
274}
275
276//Ultrasonic robot
277void Ultrasonic_Avoid() {
278 if (Distance <= 15) {
279 Bipedal_Robot.walk(2, 1000, -1); // BACKWARD x2
280 Bipedal_Robot.turn(3, 1000, -1); // LEFT x3
281 }
282 Bipedal_Robot.walk(1, 1500, 1); // FORWARD x1
283}
284
285void dance() {
286 dance_steps = dance_steps + 1;
287 staticEmtions(21);
288 if (moveId > 0) {
289 switch (dance_steps) {
290 case 0:
291 dance_steps = 0;
292 break;
293 case 1:
294 Bipedal_Robot.jitter(1, 750, 20);
295 break;
296 case 2:
297 Bipedal_Robot.jitter(1, 750, 20);
298 break;
299 case 3:
300 Bipedal_Robot.crusaito(1, 800, 30, 1);
301 break;
302 case 4:
303 Bipedal_Robot.crusaito(1, 800, 30, -1);
304 break;
305 case 5:
306 Bipedal_Robot.crusaito(1, 800, 30, 1);
307 Bipedal_Robot.home();
308 delay(300);
309 break;
310 case 6:
311 Bipedal_Robot.walk(1, 1500, -1);
312 break;
313 case 7:
314 Bipedal_Robot.walk(1, 1000, 1);
315 break;
316 case 8:
317 Bipedal_Robot.walk(1, 1000, 1);
318 Bipedal_Robot.home();
319 break;
320 case 9:
321 Bipedal_Robot.moonwalker(1, 600, 30, 1);
322 break;
323 case 10:
324 Bipedal_Robot.moonwalker(1, 600, 30, -1);
325 break;
326 case 11:
327 Bipedal_Robot.moonwalker(1, 600, 30, 1);
328 break;
329 case 12:
330 Bipedal_Robot.moonwalker(1, 600, 30, -1);
331 Bipedal_Robot.home();
332 delay(100);
333 break;
334 case 13:
335 Bipedal_Robot.walk(1, 1500, -1);
336 Bipedal_Robot.home();
337 delay(100);
338 break;
339 }
340 if (dance_steps > 14) {
341 dance_steps = 0;
342 }
343 } else {
344 Resting = 1;
345 moveId = 0;
346 dance_steps = 0;
347 }
348}
349
350void receiveMovement() {
351 sendAck();
352 ws2812_task_mode = 0;
353 emotion_task_mode = 0;
354 if (Bipedal_Robot.getRestState() == true) Bipedal_Robot.setRestState(false);
355 isServoResting = Bipedal_Robot.getRestState();
356 char *arg;
357 arg = SCmd.next();
358 if (arg != NULL) {
359 moveId = atoi(arg);
360 if (moveId == 0) {
361 Resting = 1;
362 }
363 } else {
364 moveId = 0;
365 }
366 arg = SCmd.next();
367 if (arg != NULL) {
368 T = atoi(arg);
369 if (T == 0) {
370 T = 1000;
371 } else if (T == 1) {
372 T = 1500;
373 } else if (T == 2) {
374 T = 2000;
375 }
376 } else T = 2000;
377 Serial.print("T is:");
378 Serial.print(T);
379 arg = SCmd.next();
380 if (arg != NULL) moveSize = atoi(arg);
381 else moveSize = 15;
382}
383
384void move(int movemode) {
385 // bool manualMode = false;
386 switch (movemode) {
387 case 0:
388 Bipedal_Robot.home();
389 if (Resting == 1) {
390 Bipedal_Robot.setRestState(false);
391 Bipedal_Robot.home();
392 Resting = 0;
393 }
394 break;
395 case 1:
396 staticEmtions(21);
397 Bipedal_Robot.walk(1, T, 1);
398 break;
399 case 2:
400 staticEmtions(21);
401 Bipedal_Robot.walk(1, T, -1);
402 break;
403 case 3:
404 staticEmtions(21);
405 Bipedal_Robot.turn(1, T, 1);
406 break;
407 case 4:
408 staticEmtions(21);
409 Bipedal_Robot.turn(1, T, -1);
410 break;
411 case 5:
412 Bipedal_Robot.updown(1, 2000, 30);
413 break;
414 case 6: Bipedal_Robot.moonwalker(1, T, moveSize, 1); break;
415 case 7: Bipedal_Robot.moonwalker(1, T, moveSize, -1); break;
416 case 8: Bipedal_Robot.swing(1, T, moveSize); break;
417 case 9: Bipedal_Robot.crusaito(1, T, moveSize, 1); break;
418 case 10: Bipedal_Robot.crusaito(1, T, moveSize, -1); break;
419 case 11: Bipedal_Robot.jump(1, T); break;
420 case 12: Bipedal_Robot.flapping(1, T, moveSize, 1); break;
421 case 13: Bipedal_Robot.flapping(1, T, moveSize, -1); break;
422 case 14: Bipedal_Robot.tiptoeSwing(1, T, moveSize); break;
423 case 15: Bipedal_Robot.bend(1, T, 1); break;
424 case 16: Bipedal_Robot.bend(1, T, -1); break;
425 case 17: Bipedal_Robot.shakeLeg(1, T, 1); break;
426 case 18:
427 staticEmtions(21);
428 Bipedal_Robot.swing(1, 1100, 50);
429 Bipedal_Robot.home();
430 Resting = 1;
431 moveId = 0;
432 clearEmtions();
433 break;
434 case 19:
435 staticEmtions(22);
436 Bipedal_Robot.moonwalker(1, 1550, 50, 1); //1541
437 Bipedal_Robot.home();
438 Resting = 1;
439 moveId = 0;
440 clearEmtions();
441 break;
442 case 20:
443 staticEmtions(23);
444 Bipedal_Robot.ascendingTurn(2, 700, 12); //1332
445 clearEmtions();
446 delay(100);
447 Bipedal_Robot.home();
448 Resting = 1;
449 moveId = 0;
450 break;
451 case 21:
452 Ultrasonic_Avoid();
453 break;
454 case 22:
455 dance();
456 break;
457 default:
458 break;
459 }
460}
461
462void sendAck() {
463 delay(5);
464 Serial.flush();
465}
466void sendFinalAck() {
467 delay(5);
468 Serial.flush();
469}
470
471void calib_homePos() {
472 int servoPos[4];
473 servoPos[0] = 90;
474 servoPos[1] = 90;
475 servoPos[2] = 90;
476 servoPos[3] = 90;
477 Bipedal_Robot._moveServos(500, servoPos);
478 Bipedal_Robot.detachServos();
479}
480
481void setup() {
482 Serial.begin(9600);
483 delay(2000);
484 // Loop through each baud rate and send commands
485 for(int i = 0; i < baudRateCount; i++){
486 BTserial.begin(baudRate[i]);
487 delay(200);
488 BTserial.println("AT+NAME=BT05");//Set the radio called Robot
489 delay(200);
490 BTserial.println("AT+ROLE=0");
491 delay(200);
492 BTserial.println("AT+UART=2");//1=2400 2=9600 3=19200 4=115200
493 delay(200);
494
495 //SoftwareSerial does not support dynamic adjustment of baud rate, so close the serial
496 BTserial.end();
497 }
498
499 BTserial.begin(9600);
500 delay(1500);
501 EEPROM.begin(512); //Initialize the ultrasonic module
502 Bipedal_Robot.init(LeftLegPin, RightLegPin, LeftFootPin, RightFootPin, true); //Set the servo pins
503 Bipedal_Robot.Buzzer_init(BuzzerPin);
504
505 Bipedal_Robot.saveTrimsOnEEPROM();
506 Bipedal_Robot.home();
507 delay(50);
508 Buzzer_Setup(); //Initialize the buzzer
509 WS2812_Setup(); //WS2812 initialization
510 Emotion_Setup();
511 Ultrasonic_Setup();
512
513 SCmd.addCommand("S", receiveStop);
514 SCmd.addCommand("C", receiveLED);
515 SCmd.addCommand("D", recieveBuzzer);
516 SCmd.addCommand("A", receiveMovement);
517 SCmd.addCommand("B", receiveEmotion);
518 SCmd.addCommand("H", receiveAvoid);
519 SCmd.addCommand("M", receiveMusic);
520
521 inputString.reserve(200);
522 SCmd.addDefaultHandler(receiveStop);
523 Serial.println("Set the name of the Bluetooth module to BT05.");
524 Serial.println("Set the Bluetooth baud rate to 9600.");
525}
526
527void loop() {
528 SCmd.readSerial();
529 Emotion_Detection();
530 WS2812_Show(ws2812_task_mode); //Car color lights display function
531 if (millis() - lastUploadVoltageTime > UPLOAD_VOL_TIME) {
532 upLoadVoltageToApp();
533 lastUploadVoltageTime = millis();
534 }
535 if (millis() - lastUploadDistanceTime > 200) {
536 if (ultrasonicavoidMode == 1) {
537 upLoadDistanceToApp();
538 }
539 lastUploadDistanceTime = millis();
540 }
541 if (Check_Module_value == MATRIX_IS_EXIST) {
542 Emotion_Show(emotion_task_mode); //Led matrix display function
543 }
544 move(moveId);
545}
546
547void setup1() {
548 delay(2000);
549 playmusic(1, 2);
550 pinMode(6, OUTPUT);
551 digitalWrite(6, LOW);
552}
553void loop1() {
554 songmusic();
555}
Same as in the previous project, when the corresponding command is received by Bluetooth, the corresponding function is executed.
1delay(1500);
2EEPROM.begin(512); //Initialize the ultrasonic module
3Bipedal_Robot.init(LeftLegPin, RightLegPin, LeftFootPin, RightFootPin, true); //Set the servo pins
4Bipedal_Robot.Buzzer_init(BuzzerPin);
5
6Bipedal_Robot.saveTrimsOnEEPROM();
7Bipedal_Robot.home();
8delay(50);
9Buzzer_Setup(); //Initialize the buzzer
10WS2812_Setup(); //WS2812 initialization
11Emotion_Setup();
12Ultrasonic_Setup();
13
14SCmd.addCommand("S", receiveStop);
15SCmd.addCommand("C", receiveLED);
16SCmd.addCommand("D", recieveBuzzer);
17SCmd.addCommand("A", receiveMovement);
18SCmd.addCommand("B", receiveEmotion);
19SCmd.addCommand("H", receiveAvoid);
The decription of the commands and their functions are as shwon in the table below:
Commands |
Description |
A#parm1#parm2 |
Controls the robot’s movements. |
B#parm1 |
Expressions control command |
C#parm1#parm2#parm3#parm4 |
RGB LEDs control command |
D#parm1 |
Buzzer control command |
Send battery data every 25s |
Send the battery level to the APP. Format: P#Battery voltage |
M#parm1 |
Audio playing command |
H#parm1 |
Ultrasonic obstacle avoidanve mode or dance mode |
Send distance data under the obstacle avoidance mode |
Send the ultrasonic data to the APP. Format: E# ultrasonic data |