13. Chapter LCD1602
13.1. Component List
|
Jumper Wires x4 |
I2C LCD1602 Module x1 |
|


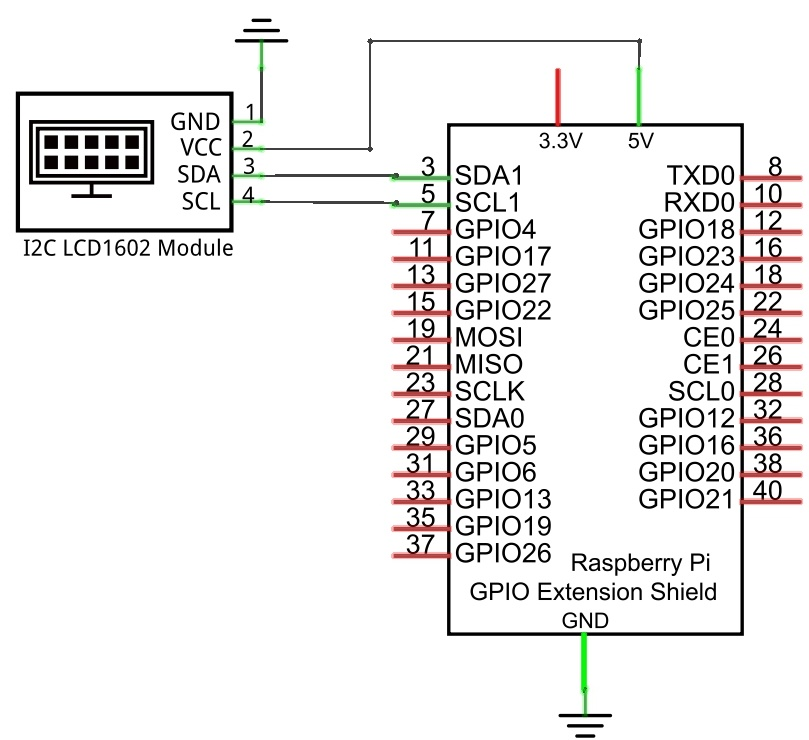
13.2. Circuit
Note that the power supply for I2C LCD1602 in this circuit is 5V.
Schematic diagram
|
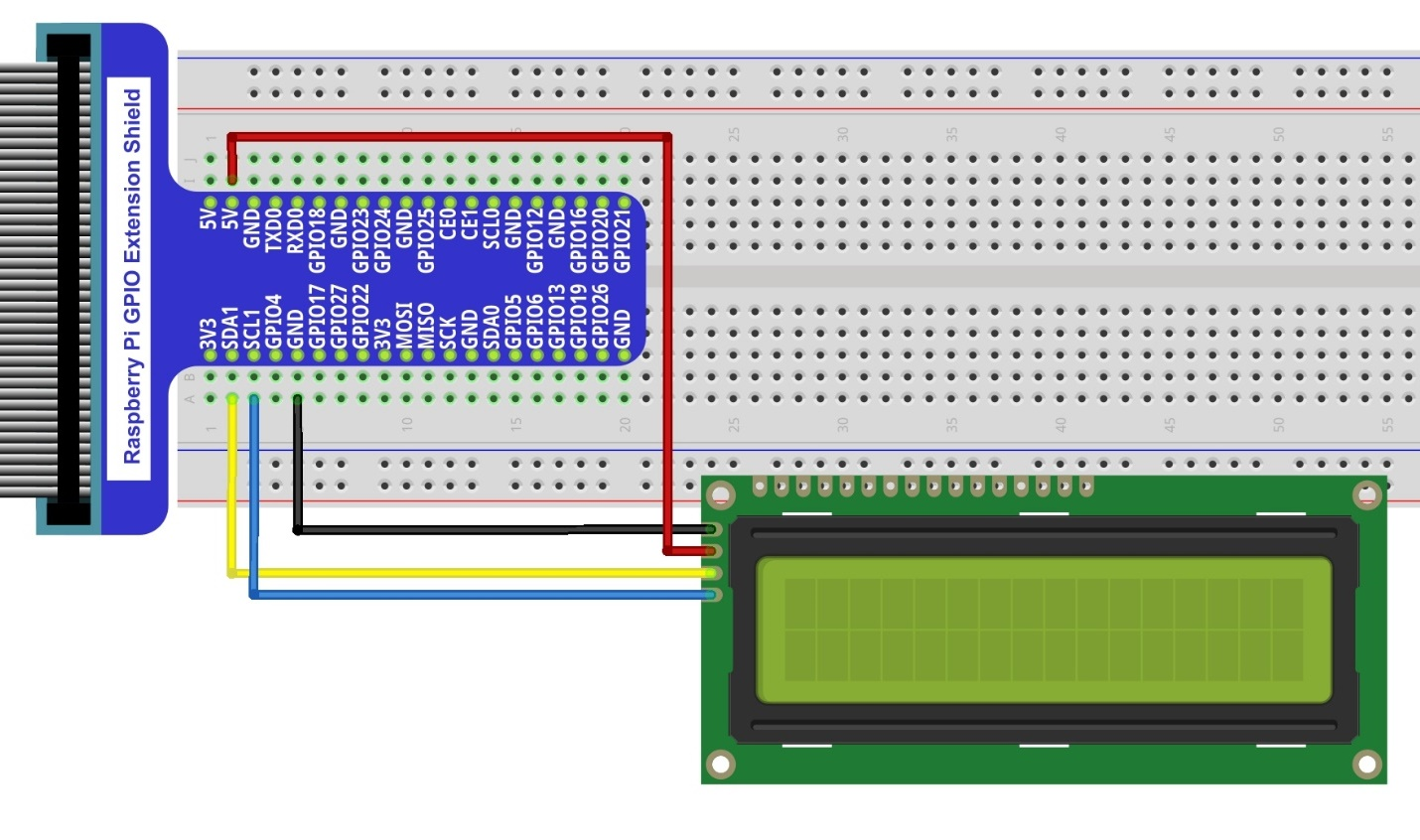
Hardware connection. If you need any support,please feel free to contact us via:
|
Note
It is necessary to configure 12C and install Smbus first (see Chapter 7 ADC for details)
13.3. Sketch
In this project, we will drive the LCD1602 display with I2C.
13.3.1. Sketch_I2CLCD1602
First, enter where the project is located:
$ cd ~/Freenove_Kit/Pi4j/Sketches/Sketch_13_I2CLCD1602

Enter the command to run the code.
$ jbang I2CLCD1602.java

When the code is running, you can see the first line of the display shows “Hello World”, and the second line displays the running time in second.
Press Ctrl+C to exit the program.
You can run the following command to open the code with Geany to view and edit it.
$ geany I2CLCD1602.java
Click the icon to run the code.
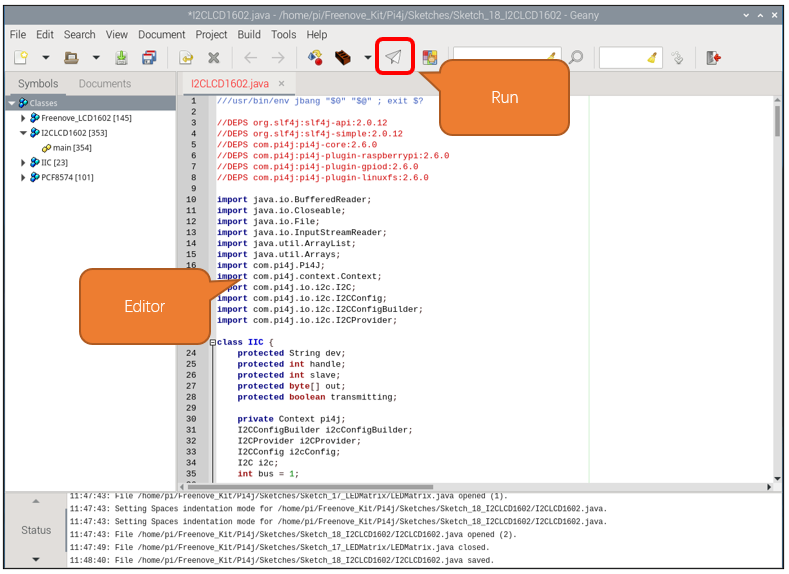
If the code fails to run, please check Geany Configuration.
The following is program code:
1// Shebang line for JBang to execute this script directly
2///usr/bin/env jbang "$0" "$@" ; exit $?
3
4// Dependencies for this script
5//DEPS org.slf4j:slf4j-api:2.0.12
6//DEPS org.slf4j:slf4j-simple:2.0.12
7//DEPS com.pi4j:pi4j-core:2.6.0
8//DEPS com.pi4j:pi4j-plugin-raspberrypi:2.6.0
9//DEPS com.pi4j:pi4j-plugin-gpiod:2.6.0
10//DEPS com.pi4j:pi4j-plugin-linuxfs:2.6.0
11
12import java.io.BufferedReader;
13import java.io.Closeable;
14import java.io.File;
15import java.io.InputStreamReader;
16import java.util.ArrayList;
17import java.util.Arrays;
18
19import com.pi4j.Pi4J;
20import com.pi4j.context.Context;
21import com.pi4j.io.i2c.I2C;
22import com.pi4j.io.i2c.I2CConfig;
23import com.pi4j.io.i2c.I2CConfigBuilder;
24import com.pi4j.io.i2c.I2CProvider;
25
26class IIC {
27 protected String dev;
28 protected int handle;
29 protected int slave;
30 protected byte[] out;
31 protected boolean transmitting;
32
33 private Context pi4j;
34 I2CConfigBuilder i2cConfigBuilder;
35 I2CProvider i2CProvider;
36 I2CConfig i2cConfig;
37 I2C i2c;
38 int bus = 1;
39
40 public IIC(int bus) {
41 this.bus = bus;
42 constructor();
43 }
44
45 public IIC(String s) {
46 String b = s.split("i2c-")[1];
47 try {
48 this.bus = Integer.parseInt(b);
49 } catch (Exception e) {
50 this.bus = 1;
51 }
52 constructor();
53 }
54
55 private void constructor() {
56 pi4j = Pi4J.newAutoContext();
57 i2CProvider = pi4j.provider("linuxfs-i2c");
58 i2cConfigBuilder = I2C.newConfigBuilder(pi4j).bus(bus);
59 }
60
61 public void beginTransmission(int address) {
62 if (i2cConfig == null) {
63 i2cConfig = i2cConfigBuilder.device(address).build();
64 }
65
66 if (i2c == null) {
67 i2c = i2CProvider.create(i2cConfig);
68 }
69 }
70
71 public void write(int b) {
72 i2c.write(b);
73 }
74
75 public byte read() {
76 return i2c.readByte();
77 }
78
79 public byte[] read(int size) {
80 return i2c.readByteBuffer(size).array();
81 }
82
83 public void endTransmission() {
84 i2c.close();
85 }
86
87 public static String[] list() {
88 ArrayList<String> devs = new ArrayList<String>();
89 File dir = new File("/dev");
90 File[] files = dir.listFiles();
91 if (files != null) {
92 for (File file : files) {
93 if (file.getName().startsWith("i2c-")) {
94 devs.add(file.getName());
95 }
96 }
97 }
98 String[] tmp = devs.toArray(new String[devs.size()]);
99 Arrays.sort(tmp);
100 return tmp;
101 }
102}
103
104class PCF8574 {
105 private int address;
106 private IIC i2c;
107 private int currValue;
108
109 public PCF8574(int addr) {
110 address = addr;
111 i2c = new IIC(IIC.list()[0]);
112 currValue = 0;
113 }
114
115 public int digitalRead(int pin) {
116 int val = readByte();
117 return ((val & (1 << pin)) == (1 << pin)) ? 1 : 0;
118 }
119
120 public int readByte() {
121 return currValue;
122 }
123
124 public void digitalWrite(int pin, int val) {
125 int value = currValue;
126 if (val == 1) {
127 value |= (1 << pin);
128 } else if (val == 0) {
129 value &= ~(1 << pin);
130 } else {
131 return;
132 }
133 writeByte(value);
134 }
135
136 public void writeByte(int data) {
137 currValue = data;
138 i2c.beginTransmission(address);
139 i2c.write(data);
140 i2c.endTransmission();
141 }
142
143 public int getCurrentValue() {
144 return currValue;
145 }
146}
147
148class Freenove_LCD1602 {
149 final public int // HD44780U commands
150 CLEAR = 0x01,
151 HOME = 0x02,
152 ENTRY = 0x04,
153 CTRL = 0x08,
154 CDSHIFT = 0x10,
155 FUNC = 0x20,
156 CGRAM = 0x40,
157 DDRAM = 0x80;
158
159 final public int // flags for display entry mode
160 ENTRY_SH = 0x01,
161 ENTRY_ID = 0x02;
162
163 final public int // flags for display/cursor on/off control
164 BLINK_CTRL = 0x01,
165 CURSOR_CTRL = 0x02,
166 DISPLAY_CTRL = 0x04;
167
168 final public int // flags function set
169 FUNC_F = 0x04,
170 FUNC_N = 0x08,
171 FUNC_DL = 0x10,
172 MOVERIGHT = 0x04, // flags for display/cursor shift
173 MOVELEFT = 0x00,
174 DISPLAYMOVE = 0x08,
175 CURSORMOVE = 0x00;
176
177 final public int[] rowOff = { 0x00, 0x40, 0x14, 0x54 };
178 private int func = 0, control = 0;
179 PCF8574 pcf;
180 private int rows, cols, rsPin, enPin, rwPin;
181 int displayMode = 0;
182
183 private void delay(long ms) {
184 long startTime = System.nanoTime();
185 long endTime = startTime + (ms * 1000 * 1000);
186 while (System.nanoTime() < endTime) {
187 }
188 }
189
190 private int constrain(int value, int min, int max) {
191 if (value < min) {
192 return min;
193 } else if (value > max) {
194 return max;
195 } else {
196 return value;
197 }
198 }
199
200 public Freenove_LCD1602(PCF8574 ipcf) {
201 pcf = ipcf;
202 rows = 2;
203 cols = 16;
204 rsPin = 0; // connect to PCF8574 module
205 enPin = 2;
206 rwPin = 1;
207
208 pcf.digitalWrite(rsPin, 0);
209 pcf.digitalWrite(enPin, 0);
210 pcf.digitalWrite(rwPin, 0);
211 delay(35);
212 func = FUNC | FUNC_DL; // set 8-bit mode 3 times
213 put4Command(func >> 4);
214 delay(35);
215 put4Command(func >> 4);
216 delay(35);
217 put4Command(func >> 4);
218 delay(35);
219 func = FUNC; // set 4-bit mode
220 put4Command(func >> 4);
221 delay(35);
222 if (rows > 1) {
223 func = FUNC_N;
224 putCommand(func);
225 delay(35);
226 }
227 display(true); // lcd initializtion
228 lcdCursor(false);
229 cursorBlink(false);
230
231 displayMode = ENTRY | ENTRY_ID;
232 putCommand(displayMode);
233 putCommand(CDSHIFT | MOVERIGHT);
234 backLightON();
235 home();
236 lcdClear();
237 }
238
239 // for sending data/cmds
240 public void sendDataCmd(int data) {
241 int d4 = data & 0xf0;
242 int currentValue = pcf.getCurrentValue();
243 pcf.writeByte(d4 | (currentValue & 0x0f));
244 strobe();
245 currentValue = pcf.getCurrentValue();
246 d4 = (data << 4) & 0xf0;
247 pcf.writeByte(d4 | (currentValue & 0x0f));
248 strobe();
249 }
250
251 // send command
252 public void putCommand(int cmd) {
253 pcf.digitalWrite(rsPin, 0);
254 sendDataCmd(cmd);
255 delay(2);
256 }
257
258 public void put4Command(int command) {
259 int currentValue = pcf.getCurrentValue();
260 pcf.digitalWrite(rsPin, 0);
261 pcf.writeByte(((command << 4) & 0xf0) | (currentValue & 0x0f));
262 strobe();
263 }
264
265 // pulse enable
266 public void strobe() {
267 pcf.digitalWrite(enPin, 1);
268 pcf.digitalWrite(enPin, 0);
269 }
270
271 // send a data byte to be displayed on the display.
272 public void putChar(char data) {
273 pcf.digitalWrite(rsPin, 1);
274 sendDataCmd(data);
275 }
276
277 // Send a string to be displayed on the display.
278 public void puts(String str) {
279 for (int i = 0; i < str.length(); i++) {
280 putChar(str.charAt(i));
281 }
282 }
283
284 // turn display, cursor, cursor blinking on/off
285 public void display(boolean state) {
286 if (state) {
287 control |= DISPLAY_CTRL;
288 } else {
289 control &= ~DISPLAY_CTRL;
290 }
291 putCommand(CTRL | control);
292 }
293
294 public void lcdCursor(boolean state) {
295 if (state) {
296 control |= CURSOR_CTRL;
297 } else {
298 control &= ~CURSOR_CTRL;
299 }
300 putCommand(CTRL | control);
301 }
302
303 public void cursorBlink(boolean state) {
304 if (state) {
305 control |= BLINK_CTRL;
306 } else {
307 control &= ~BLINK_CTRL;
308 }
309 putCommand(CTRL | control);
310 }
311
312 // set the position of the cursor on the display
313 public void position(int x, int y) {
314 constrain(x, 0, cols);
315 constrain(y, 0, rows);
316 putCommand(x + (DDRAM | rowOff[y]));
317 }
318
319 // Home the cursor
320 public void home() {
321 putCommand(HOME);
322 }
323
324 // clear the screen
325 public void lcdClear() {
326 putCommand(CLEAR);
327 putCommand(HOME);
328 }
329
330 // turn on the backLight
331 public void backLightON() {
332 pcf.digitalWrite(3, 1);
333 }
334
335 // turn off the backLight
336 public void backLightOFF() {
337 pcf.digitalWrite(3, 0);
338 }
339
340 // scroll the display a unit to left
341 public void scrollDisplayLeft() {
342 putCommand(CDSHIFT | DISPLAYMOVE | MOVELEFT);
343 }
344
345 // scroll the display a unit to right
346 public void scrollDisplayRight() {
347 putCommand(CDSHIFT | DISPLAYMOVE | MOVERIGHT);
348 }
349
350 // text flows left to right
351 public void leftToRight() {
352 displayMode |= ENTRY_ID;
353 putCommand(ENTRY | displayMode);
354 }
355
356 // text flows right to left
357 public void rightToLeft() {
358 displayMode &= ~ENTRY_ID;
359 putCommand(ENTRY | displayMode);
360 }
361
362 // scroll the display follow the cursor
363 public void autoScroll() {
364 displayMode |= ENTRY_SH;
365 putCommand(ENTRY | displayMode);
366 }
367
368 public void noAutoScroll() {
369 displayMode &= ~ENTRY_SH;
370 putCommand(ENTRY | displayMode);
371 }
372}
373
374public class I2CLCD1602 {
375 public static void main(String[] args) throws Exception {
376 PCF8574 pcf = new PCF8574(0x27); // or 0x3F
377 Freenove_LCD1602 lcd;
378 lcd = new Freenove_LCD1602(pcf);
379 lcd.position(0, 0); // show time on the lcd display
380 lcd.puts("Hello World.");
381 try {
382 int count = 0;
383 while (true) {
384 String buf = "Count: " + count;
385 lcd.position(0, 1); // show time on the lcd display
386 lcd.puts(buf);
387 Thread.sleep(1000);
388 count++;
389 }
390 } catch (InterruptedException e) {
391 Thread.currentThread().interrupt();
392 }
393 }
394}
Constructor, assigns the I2C bus to bus, and calls the constructor function to initialize the I2C bus.
1public IIC(int bus) {
2 this.bus = bus;
3 constructor();
4}
5
6public IIC(String s) {
7 String b = s.split("i2c-")[1];
8 try {
9 this.bus = Integer.parseInt(b);
10 } catch (Exception e) {
11 this.bus = 1;
12 }
13 constructor();
14}
I2C constructor, initialize the I2C bus.
1private void constructor() {
2 pi4j = Pi4J.newAutoContext();
3 i2CProvider = pi4j.provider("linuxfs-i2c");
4 i2cConfigBuilder = I2C.newConfigBuilder(pi4j).bus(bus);
5}
I2C bus acquisition function. Calling the list() function can obtain the names of all I2C buses currently existing on the Raspberry Pi.
1public static String[] list() {
2 ArrayList<String> devs = new ArrayList<String>();
3 File dir = new File("/dev");
4 File[] files = dir.listFiles();
5 if (files != null) {
6 for (File file : files) {
7 if (file.getName().startsWith("i2c-")) {
8 devs.add(file.getName());
9 }
10 }
11 }
12 String[] tmp = devs.toArray(new String[devs.size()]);
13 Arrays.sort(tmp);
14 return tmp;
15}
Use the pi4j library to repackage the I2C functions. These functions refer to the classic usage of Arduino. This is to be compatible with the subsequent PCF8574 class and Freenove_LCD1602 class, making it easier to drive LCD1602.
1public void beginTransmission(int address) {
2 if (i2cConfig == null) {
3 i2cConfig = i2cConfigBuilder.device(address).build();
4 }
5
6 if (i2c == null) {
7 i2c = i2CProvider.create(i2cConfig);
8 }
9}
10
11public void write(int b) {
12 i2c.write(b);
13}
14
15public byte read() {
16 return i2c.readByte();
17}
18
19public byte[] read(int size) {
20 return i2c.readByteBuffer(size).array();
21}
22
23public void endTransmission() {
24 i2c.close();
25}
The following are the two classes we wrote for LCD1602 in reference to Arduino. Here, we do not go into too much detail here. If you are interested in this code, you can use Geany to view the code.
1class PCF8574 {
2 ......
3}
4
5class Freenove_LCD1602 {
6 ......
7}
Initialize PCF8574 and Freenove_LCD1602 classes, and assign the value to LCD.
1PCF8574 pcf = new PCF8574(0x27); // or 0x3F
2Freenove_LCD1602 lcd;
3lcd = new Freenove_LCD1602(pcf);
At the first lin of LCD1602, print the character “Hello World”.
1lcd.position(0, 0); // show time on the lcd display
2lcd.puts("Hello World.");
Print the character “Count” and the counts number at the second line every one second.
1int count = 0;
2while (true) {
3 String buf = "Count: " + count;
4 lcd.position(0, 1); // show time on the lcd display
5 lcd.puts(buf);
6 Thread.sleep(1000);
7 count++;
8}
In Java, an InterruptedException is thrown when a thread’s waiting, sleeping (e.g., using ‘Thread.sleep()’), or other blocking operations are interrupted. When a thread is interrupted, its interrupted status is set to true, and any of these blocking operations will result in an ‘InterruptedException’ being thrown.
When ‘InterruptedException’ is capured, ‘Thread.currentThread().interrupt()’ is called keep the interrupt status, so that the thread can respond to the interruption request appropriately.
1} catch (InterruptedException e) {
2 Thread.currentThread().interrupt();
3}