Chapter 13 Kinematic Analysis
In this chapter, we will get to know the speciality of omni wheels and how an omni-wheeled car can move in any direction.
Related Knowledge
Omni Wheels
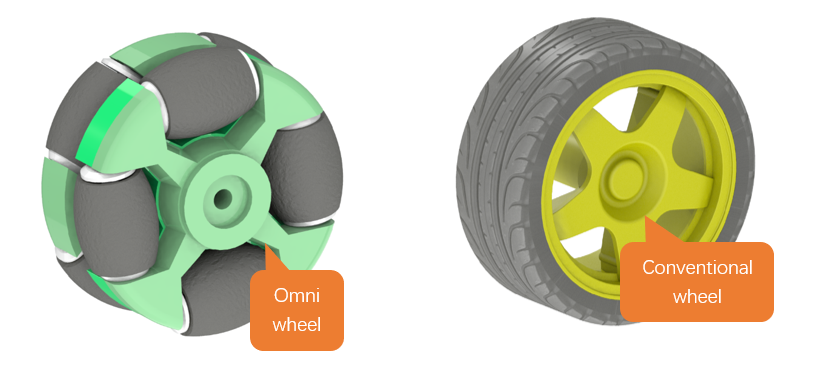
Omni wheels are a unique type of wheel that can move freely in any direction, not just linearly forward or backward. Unlike conventional wheels, omni wheels consist of two layers, and they feature a ring of small rollers around the perimeter that can spin freely.
As shown in the figure below, the left one is an omni wheel and the right one is a conventional wheel.
Attitude Calculation of Omni-Wheeled Car
Omni wheels are specially designed to move freely in multiple directions, but a single or pair of these wheels alone cannot accomplish true omnidirectional movement. It is only through the coordinated action of three or more omni wheels that full omnidirectional capability is achieved. The design of an omni wheel enables it to exert force in various directions, yet a mere one or two wheels cannot provide the necessary support and control in all directions simultaneously. Each wheel of an omni wheeled robot car can independently control its rotational speed and direction, thereby enabling a variety of complex motion patterns, including straight-line movements, rotations, and diagonal motions.
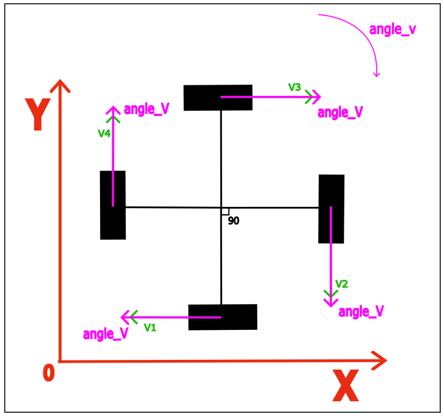
The following figure shows the attitude analysis of the omni-wheeled car.
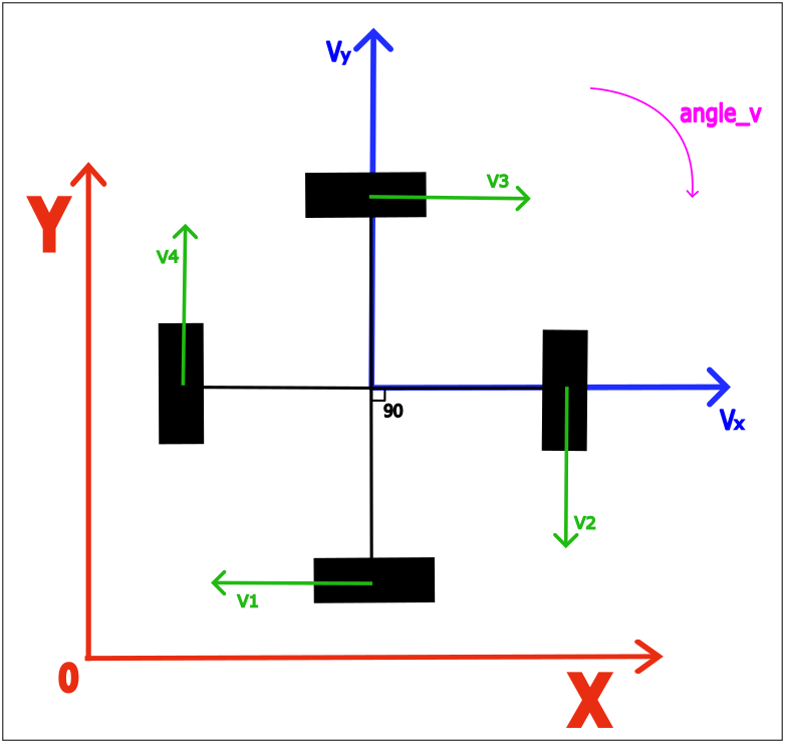
The symbols and their meaning are as described in the following table.
Symbols |
Meaning |
|---|---|
X |
The X-axis of the Absolute Coordinate System |
Y |
The Y-axis of the Absolute Coordinate System |
Vx |
The Decomposition of the Car’s Total Speed on the X-axis |
Vy |
The Decomposition of the Car’s Total Speed on the Y-axis |
V1 |
The Total Speed of Wheel 1 |
V2 |
The Total Speed of Wheel 2 |
V3 |
The Total Speed of Wheel 3 |
V4 |
The Total Speed of Wheel 4 |
angle_v |
The Car’s Angular Velocity |
Let us decompose the motion of the car and compute the velocity of its four wheels individually.
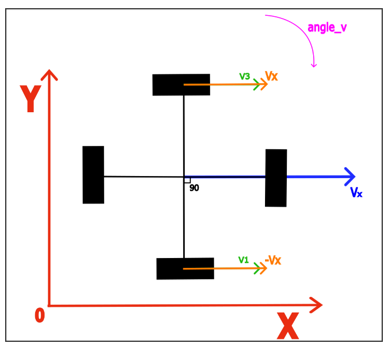
When the car moves purely along the X-axis, it has no velocity component along the Y-axis, as illustrated in the figure below:
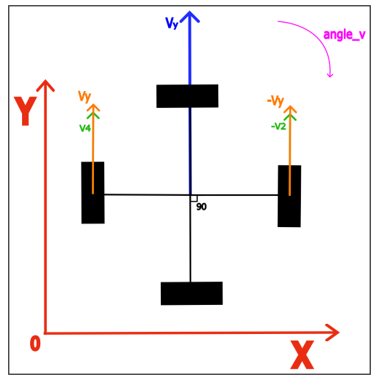
When the car moves purely along the Y-axis, it has no velocity component along the X-axis, as illustrated in the figure below:
When the car is only performing rotational movement.
By superimposing the three situations, we can derive the motion equation for the car as follows:
When the car moves in the direction of θ, the values of Vx and Vy can be determined by decomposing the velocity vector:
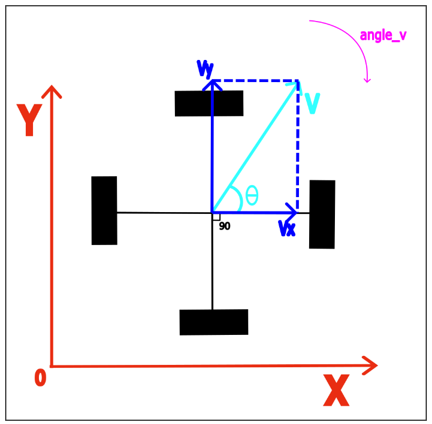
Here, V represents the car’s total speed, and θ is the angle of the car’s translation in the XY plane, with the positive direction of the X-axis as the reference.
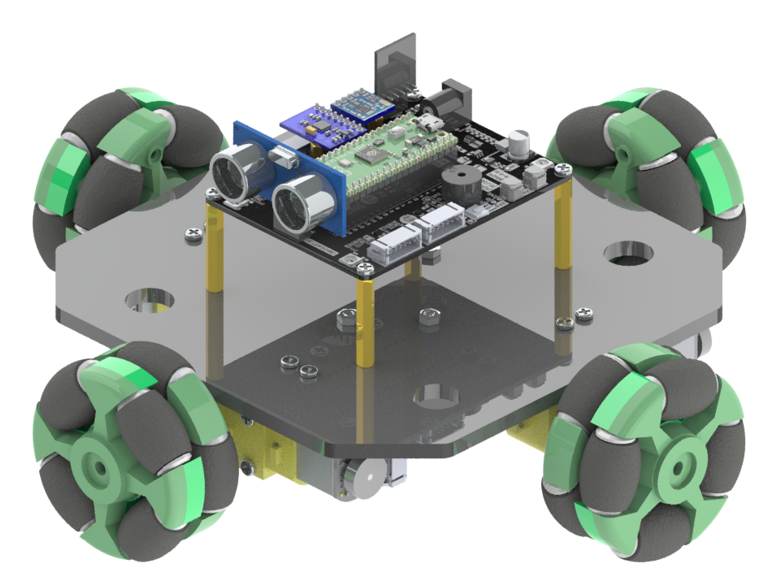
Circuit
For this chapter, we use the assembled car. Please refer to Chapter 1 Car Assembly for the detailed assembly process.
Sketch
Next, we download the code to Raspberry Pi Pico (W) to examine the attitude calculation. Open “Sketch_11.1_Kinematic_analysis” folder under “Freenove_Omni_Wheel_Car_Kit_for_Raspberry_Pi_Pico\Four-Wheel\Sketches” and double-click “Sketch_11.1_Kinematic_analysis.ino”.
Code
Sketch_11.1_Kinematic_analysis.ino
1/***********************************************************************************
2 Filename : Sketch_11.1_Kinematic_analysis
3 Description : Use Raspberry Pi Pico Control the trolley to move in all directions
4 Auther : www.freenove.com
5 Modification: 2024/08/23
6************************************************************************************/
7
8const int wheel1_A_pin = 8; // Motor1 drive pin
9const int wheel1_B_pin = 9; // Motor1 drive pin
10
11const int wheel2_A_pin = 12;// Motor2 drive pin
12const int wheel2_B_pin = 13;// Motor2 drive pin
13
14const int wheel3_A_pin = 15;// Motor3 drive pin
15const int wheel3_B_pin = 14;// Motor3 drive pin
16
17const int wheel4_A_pin = 20;// Motor4 drive pin
18const int wheel4_B_pin = 21;// Motor4 drive pin
19
20int a1,b1,a2,b2,a3,b3,a4,b4;
21int v1,v2,v3,v4;
22
23void setup() {
24 // put your setup code here, to run once:
25 Motor_init();
26}
27
28void loop() {
29 // put your main code here, to run repeatedly:
30 Motor_Control(200,0); // Forward
31 delay(1000);
32 Motor_Control(-200,0); // Back
33 delay(1000);
34 Motor_Control(200,90); // Left translation
35 delay(1000);
36 Motor_Control(200,-90); // Right translation
37 delay(1000);
38 Motor_Control(255,45); // Shift 45 degrees to the left
39 delay(1000);
40 Motor_Control(255,-135); // Shift 135 degrees to the right
41 delay(1000);
42 Motor_Control(255,135); // Shift 135 degrees to the left
43 delay(1000);
44 Motor_Control(255,-45); // Shift 45 degrees to the right
45 delay(5000);
46
47}
48void Motor_Control(int speed_v,int speed_a)
49{
50 int vx = - speed_v * sin ( speed_a * PI / 180 );
51 int vy = speed_v * cos ( speed_a * PI / 180 );
52
53 v1 = -vx;
54 v2 = -vy;
55 v3 = vx;
56 v4 = vy;
57
58 Motor_direction();//Motor limiting and motor output orientation
59}
60
61void Motor_direction()
62{
63 if(v1 > 0){ a1 = v1; b1 = LOW; }else{ a1 = LOW; b1 = -v1;}
64 if(v2 > 0){ a2 = v2; b2 = LOW; }else{ a2 = LOW; b2 = -v2;}
65 if(v3 > 0){ a3 = v3; b3 = LOW; }else{ a3 = LOW; b3 = -v3;}
66 if(v4 > 0){ a4 = v4; b4 = LOW; }else{ a4 = LOW; b4 = -v4;}
67
68 analogWrite(wheel1_A_pin,a1);
69 analogWrite(wheel1_B_pin,b1);
70
71 analogWrite(wheel2_A_pin,a2);
72 analogWrite(wheel2_B_pin,b2);
73
74 analogWrite(wheel3_A_pin,a3);
75 analogWrite(wheel3_B_pin,b3);
76
77 analogWrite(wheel4_A_pin,a4);
78 analogWrite(wheel4_B_pin,b4);
79}
80
81void Motor_init()
82{
83 // Set the motor PWM frequency to 16 kHz
84 analogWriteFreq(16000);
85 // Enable the motor drive pin to output mode
86 pinMode(wheel1_A_pin,OUTPUT);
87 pinMode(wheel1_B_pin,OUTPUT);
88 pinMode(wheel2_A_pin,OUTPUT);
89 pinMode(wheel2_B_pin,OUTPUT);
90 pinMode(wheel3_A_pin,OUTPUT);
91 pinMode(wheel3_B_pin,OUTPUT);
92 pinMode(wheel4_A_pin,OUTPUT);
93 pinMode(wheel4_B_pin,OUTPUT);
94}
After downloading the code, put the car on the floor, turn ON the power switch of the car, and you will see to car sequentially perform the actions of moving forward, moving backward, moving left, moving right, moving at a 45-degree angle to the left, moving at a 45-degree angle to the right, moving at a 135-degree angle to the left, and moving at a 135-degree angle to the right.
Code Explanation
When the Motor_init() function is called, pico enables the motors’ pins to output mode.
1void Motor_init()
2{
3 // Set the motor PWM frequency to 16 kHz
4 analogWriteFreq(16000);
5 // Enable the motor drive pin to output mode
6 pinMode(wheel1_A_pin,OUTPUT);
7 pinMode(wheel1_B_pin,OUTPUT);
8 pinMode(wheel2_A_pin,OUTPUT);
9 pinMode(wheel2_B_pin,OUTPUT);
10 pinMode(wheel3_A_pin,OUTPUT);
11 pinMode(wheel3_B_pin,OUTPUT);
12 pinMode(wheel4_A_pin,OUTPUT);
13 pinMode(wheel4_B_pin,OUTPUT);
14}
The function Motor_Control() calculates the velocity of each wheel.
1void Motor_Control(int speed_v,int speed_a)
2{
3 int vx = - speed_v * sin ( speed_a * PI / 180 );
4 int vy = speed_v * cos ( speed_a * PI / 180 );
5
6 v1 = -vx;
7 v2 = -vy;
8 v3 = vx;
9 v4 = vy;
10
11 Motor_direction();//Motor limiting and motor output orientation
12}
The function Motor_Control() is called under the loop function to control the car’s movement.
1Motor_Control(255,135); // Shift 135 degrees to the left
Reference
- double sqrt(double x);
This function is used to calculate the square root of a number.
- void Motor_Control (int speed_v,int speed_a);
The function is used to control the movement of the car.
speed_v: the speed of the car’s translation, ranging from -255 to 255.
speed_a: the direction of the car’s movement, in degrees, ranging from -180 to 180.