Chapter 17 Around Mode
In the Around Mode, the vehicle consistently orients itself around a fixed central point using the ultrasonic module as a reference, maintaining a constant speed for circular motion. Users can modify the car’s orbital radius and direction via Freenove APP, with adjustable radius settings from 0 to 100 centimeters.
Related Knowledge
Around Mode Attitude Calculating
Around mode essentially enables the car to perform circular motion, which is a common type of composite movement where an object moves along a circular path around a central point.
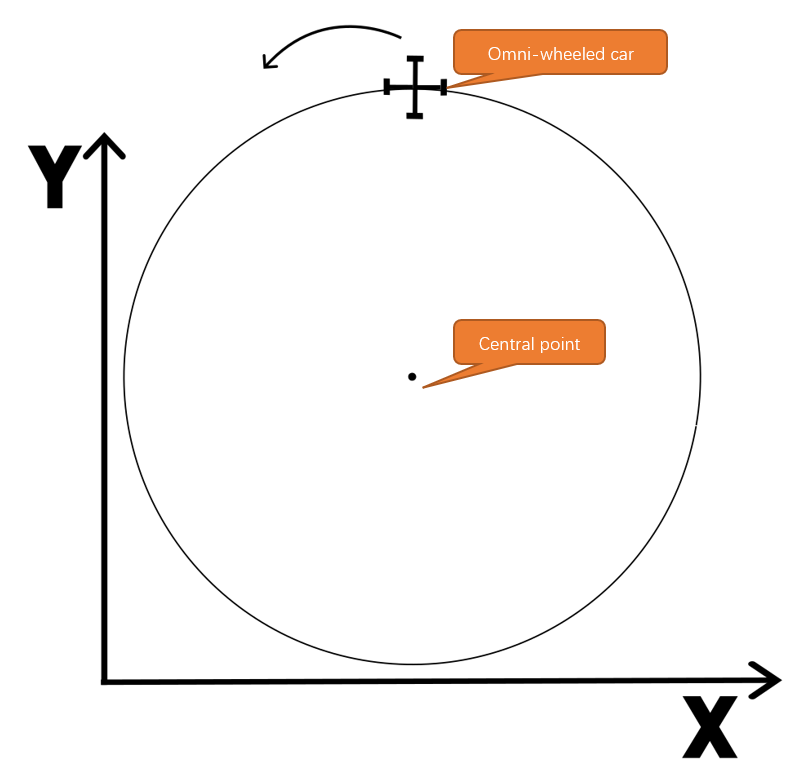
To simplify the model for analysis, we can consider the omni-wheeled car as a particle for motion analysis. At this point, we can obtain the analytical results as shown in the following figure:
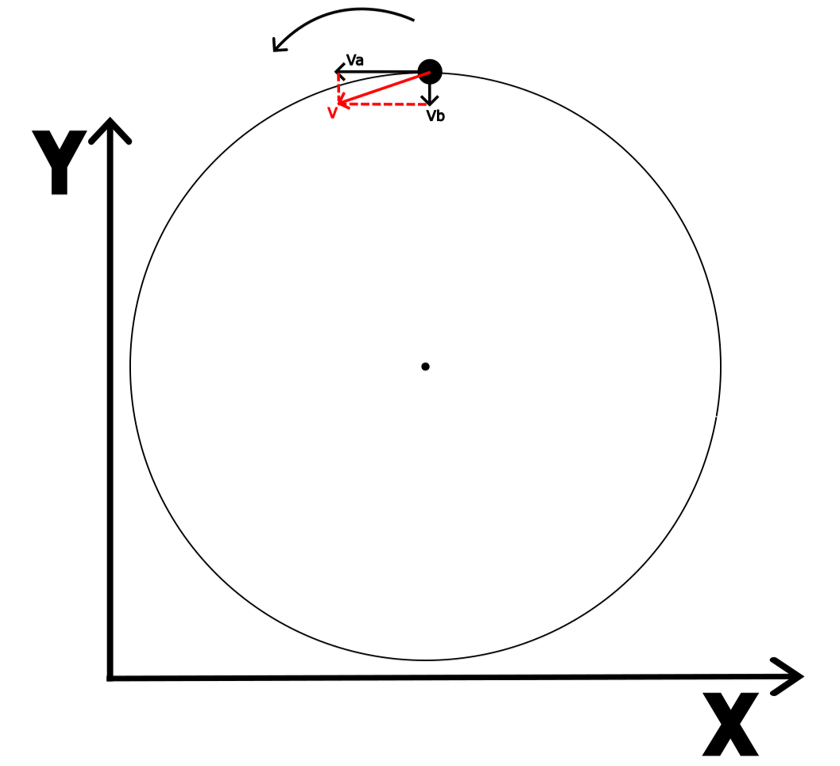
We place the car stationary on a point of the circular trajectory and decompose its velocity V into components Va and Vb along the x-axis and y-axis. Va is always aligned with the tangent to the circle at that point, while Vb points consistently towards the center of the circle. This allows us to consider the circular motion as a combination of two movements: Va is the speed of the car moving translationally in the horizontal direction, and Vb is the speed of the car’s rotational motion, or angular velocity. Building on the formulas for pose calculation, we can derive the following equations:
Using this formula, we can enable the omni-wheeled car to perform circular motion.
Around Mode Kinematic Analysis
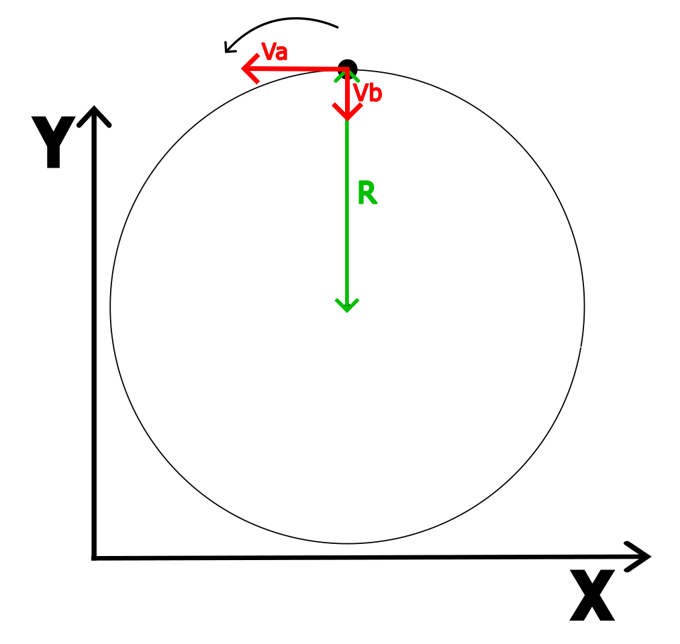
Assuming the radius of the circular motion is R, the formula V = W * R tells us that when the value of the radius R remains constant, the ratio between V and W also remains constant. Substituting into the formula, we get:
You only need to set one of the values for Va or Vb to determine the radius of the circular motion trajectory. The overall formula is:
Note
R and Va in the formula are the values that need to be set, and V1, V2, V3, are the linear speeds of the three wheels.
Sketch
Open “Sketch_15.1_Around_car” folder in “Freenove_Omni_Wheel_Car_Kit_for_Raspberry_Pi_Pico\Three-Wheel\Sketches” and then double-click “Sketch_15.1_Around_car.ino”.
Code
Sketch_15.1_Around_car.ino
1bool timer_1ms_control(struct repeating_timer *t) {
2 if (millis() % 5 == 0) {
3 Getencoder_Data();
4 speed_add();
5 }
6 if (millis() % 15 == 0) {
7 speed_calculate(); // Find the average speed and filter the burrs
8 Circle_Control(2,30,clockwise);
9 }
10 return true;
11}
Motor.cpp
1void Circle_Control(float r, float V, float location)
2{
3 if(location == clockwise)
4 {
5 angle_circle = V / r;
6 vx = - V * sin (90 * (PI / 180));
7 vy = V * cos (90 * (PI / 180));
8 v1 = -vx + angle_circle;
9 v2 = 0.5 * vx - sqrt(3) / 2 * vy + angle_circle;
10 v3 = 0.5 * vx + sqrt(3) / 2 * vy + angle_circle;
11 }
12
13 if(location == anticlockwise)
14 {
15 angle_circle = V / r;
16 vx = - V * sin (-90 * (PI / 180));
17 vy = V * cos (-90 * (PI / 180));
18 v1 = -vx + angle_circle;
19 v2 = 0.5 * vx - sqrt(3) / 2 * vy + angle_circle;
20 v3 = 0.5 * vx + sqrt(3) / 2 * vy + angle_circle;
21 }
22 // Speed PID control
23 pid_v1 = Speed1_PID(v1,speed1);
24 pid_v2 = Speed2_PID(v2,speed2);
25 pid_v3 = Speed3_PID(v3,speed3);
26
27 Motor_direction();// Motor limiting and motor output orientation
28}
After compiling and uploading the code, place the omni-wheeled car on the ground and power it on. The omni-wheeled car will perform a uniform circular motion with a radius of 20 cm in a clockwise direction.
Code Explanation
Determine the input parameter; when the parameter is “clockwise”, the car circles clockwise, and when the parameter is “anticlockwise”, the car circles counterclockwise.
1if(location == clockwise)
2{
3 angle_circle = V / r;
4 vx = - V * sin (90 * (PI / 180));
5 vy = V * cos (90 * (PI / 180));
6 v1 = -vx + angle_circle;
7 v2 = 0.5 * vx - sqrt(3) / 2 * vy + angle_circle;
8 v3 = 0.5 * vx + sqrt(3) / 2 * vy + angle_circle;
9}
10
11if(location == anticlockwise)
12{
13 angle_circle = V / r;
14 vx = - V * sin (-90 * (PI / 180));
15 vy = V * cos (-90 * (PI / 180));
16 v1 = -vx + angle_circle;
17 v2 = 0.5 * vx - sqrt(3) / 2 * vy + angle_circle;
18 v3 = 0.5 * vx + sqrt(3) / 2 * vy + angle_circle;
19}
About Around mode
For the connection of Bluetooth device, please refer to Introduction to the APP
Please note that the example code for this part does not involve Bluetooth.
To control the car via Bluetooth, please open “Sketch_20.1_Bluetooth_car” folder in “Three-Wheel\Sketches” and then double-click “Sketch_20.1_Bluetooth_car.ino”.
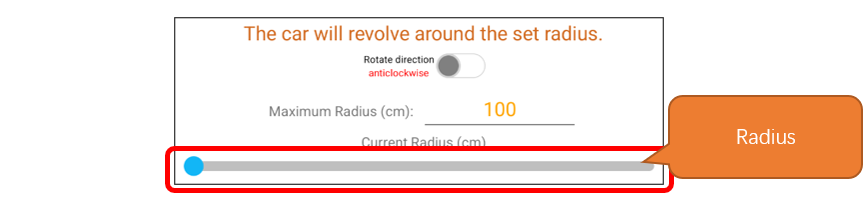
Interface Introduction
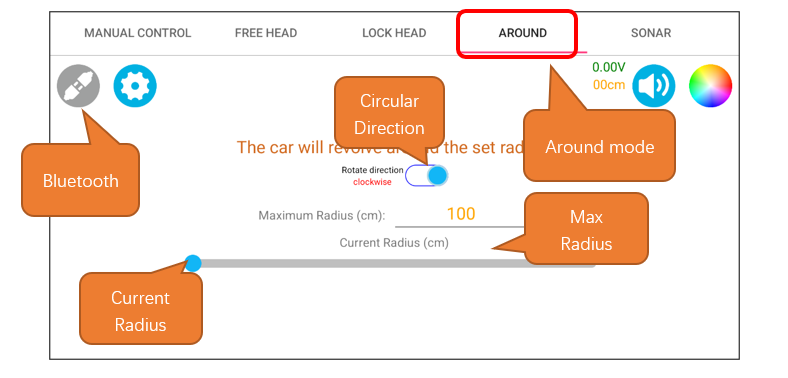
Operation Description
This button is to change the cicular direction. When it is enabled, the car circles clockwise, and disabled, it circles counterclockwise.

Input the maximum radius. If the number set is below 100, it will be 100.
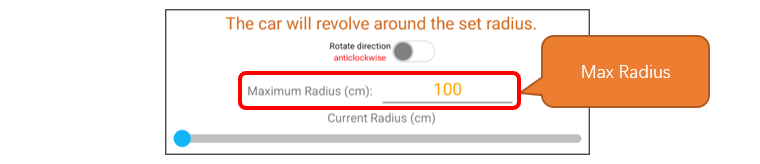
Slide the bar to set the car’s circular radius. The range is from 0 to the max radius set.